
мһҗмңЁмЈјн–үмһҗлҸҷм°Ё- 4. мһҗм°Ё мң„м№ҳ м¶”м • мһҘ비 к°ңл°ңм—җ мҶҚлҸ„
нҺҳмқҙм§Җ м •ліҙ
кёҖ : мұ„мҳҒм„қ(webmaster@global-autonews.com)|
|
мҠ№мқё 2013-04-02 17:03:00 |



ліёл¬ё
2010л…„лҢҖлҘј кҙҖнҶөн• нҷ”л‘җлҠ” мһҗмңЁмЈјн–үмһҗлҸҷм°ЁлӢӨ. м§ҖкёҲ м „ м„ёкі„ мһҗлҸҷм°ЁнҡҢмӮ¬л“ӨмқҖ мһҗмңЁмЈјн–үмһҗлҸҷм°Ё мӢңлҢҖлҘј мң„н•ҙ лӘЁл“ м—ӯлҹүмқ„ 집мӨ‘н•ҳкі мһҲлӢӨ. мҳ¬ мҙҲ лҜёкөӯ лқјмҠӨлІ к°ҖмҠӨм—җм„ң м—ҙлҰ° CESм—җм„ң м•„мҡ°л””мҷҖ нҶ мҡ”нғҖмһҗлҸҷм°Ёк°Җ мһҗмңЁмЈјн–үмһҗлҸҷм°Ё кё°мҲ мқ„ кіөк°ңн–ҲлӢӨ. л””нҠёлЎңмқҙнҠёмҳӨнҶ мҮјм—җм„ңлҠ” м»Өл„ҘнӢ°л№„нӢ°лҘј мӨ‘мӢ¬мңјлЎң н•ң лӮҙмҡ©мқҙ мҮјмһҘмқ„ мһҘм•…н•ҳл©ҙм„ң мһҗмңЁмЈјн–үмһҗлҸҷм°Ёмқҳ к°ңл°ңмқҙ лӢ№мҙҲ мҳҲмғҒліҙлӢӨ л№ЁлҰ¬ 진н–үлҗҳкі мһҲлӢӨлҠ” кІғмқ„ ліҙм—¬ мЈјм—ҲлӢӨ. мһҗмңЁмЈјн–үмһҗлҸҷм°Ёмқҳ мӢӨнҳ„м—җ н•„мҡ”н•ң кё°мҲ мӨ‘ мһҗм°Ё мң„м№ҳлҘј м •нҷ•н•ҳкІҢ м¶”м •н•ҳлҠ” кІғмқҙлӢӨ. мһҗмңЁ мЈјн–ү мһҗлҸҷм°Ё л„Ө лІҲм§ё мқҙм•јкё°лӢӨ.
кёҖ / мұ„мҳҒм„қ (кёҖлЎңлІҢмҳӨнҶ лүҙмҠӨкөӯмһҘ)
мһҗмңЁмЈјн–үмһҗлҸҷм°Ёмқҳ мӢӨнҳ„мқ„ мң„н•ҙм„ңлҠ” лӢӨм–‘н•ң кё°мҲ мқҙ н•„мҡ”н•ҳлӢӨ. '충лҸҢн•ҳм§Җ м•ҠлҠ” мһҗлҸҷм°Ё'лқјлҠ” н‘ңнҳ„мқ„ мӮ¬мҡ©н•ҳлҠ” мқјліёмқҳ кІҪмҡ°м—җм„ң м•Ң мҲҳ мһҲл“Ҝмқҙ м•Ҳм „мқҙ мөң мҡ°м„ мқҙлӢӨ. к·ё м•Ҳм „мқ„ ліҙмһҘн•ҳкё° мң„н•ң кё°мҲ мқҖ мһҗлҸҷм°Ё мһҗмІҙм—җ м№ҙл©”лқјмҷҖ л ҲмқҙлҚ”, м„јм„ң л“ұмқ„ м„Өм№ҳн•ҙ мЈјліҖмқҳ лӢӨлҘё мһҗлҸҷм°ЁлӮҳ мһҘн•ҙл¬јмқ„ к°җм§Җн•ҳлҠ” кІғмқҙ мҡ°м„ мқҙлӢӨ. мқҙ л¶Җ분к№Ңм§ҖлҠ” мғҒлӢ№н•ң л°ңм „мқҙ мқҙлЈЁм–ҙм ё мһҲлӢӨ.
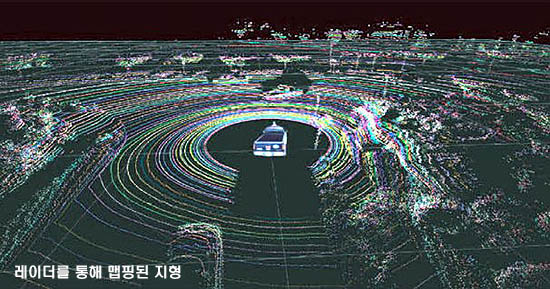
мқҙ м„јм„ңлҠ” мһҗлҸҷм°Ёмқҳ м•„лһҳмӘҪм—җ м„Өкі„н•ҙ мЈјліҖ 360лҸ„м—җ мҲҳм§Ғ мӢңм•ј 26.8лҸ„мқҳ 3м°Ёмӣҗ кіөк°„м—җ мһҲлҠ” л¬јмІҙмҷҖ кұ°лҰ¬лҘј мёЎм •н•ңлӢӨ. мӣҗнҶө мӨ‘м—җ л Ҳмқҙм Җ мҶҢмһҗлҘј м„ёлЎңлЎң 64к°ң м„Өм№ҳн•ҙ м•Ҫ 20Hzмқҳ мЈјкё°лЎң н•ҙ мӢӨнҳ„н•ңлӢӨ.
л¬ҙм—ҮліҙлӢӨ мӨ‘мҡ”н•ң кІғмқҖ мһҗм°Ёмқҳ мң„м№ҳлҘј м •нҷ•н•ҳкІҢ м¶”м •н•ҳлҠ” кІғмқҙлӢӨ. кіјкұ° мһҗлҸҷм°ЁнҡҢмӮ¬л“Өмқҳ м—°кө¬ лҢҖл¶Җ분мқҙ мҳҲлҘј л“Өл©ҙ лҸ„лЎңм—җмқҳ л§Ҳм»Ө м„Өм№ҳмҷҖ GPSмқҳ м •л°ҖлҸ„лҘј лҶ’мқҙлҠ” л“ұ мқён”„лқјмқҳ ліҖкІҪмқ„ м „м ңлЎң н•ҙ мһҗм°Ё мң„м№ҳлҘј м¶”м •н•ҙ мҷ”лӢӨ. лҸ„лЎңмҷҖ GPS мң„м„ұмқҳ ліҖкІҪм—җлҠ” кұ°м•Ўмқҳ мһҗкёҲмқҙ н•„мҡ”лЎңн•ҳкі кіөкіөл¬јмқҙкё° л•Ңл¬ём—җ н•ң кё°м—…мңјлЎңм„ңлҠ” 추진н•ҳкё° м–ҙл өлӢӨ. кІ°көӯ м—°кө¬н•ң м„ұкіјлҠ” мӢӨнҳ„мқҙ мҡ©мқҙн•ҳм§Җ м•ҠлӢӨлҠ” кІ°лЎ м—җ лҸ„лӢ¬н–ҲлӢӨ.
к·ёлһҳлҸ„ мһҗлҸҷм°ЁнҡҢмӮ¬л“Ө мӮ¬мқҙм—җм„ңлҠ” мқён”„лқјк°Җ н•„мҡ”н•ҳлӢӨлҠ” мғқк°Ғмқҙ к°•н•ҙ м–ҙлҠҗ кё°мҲ мһҗлҠ” лӢ№мҙҲм—җлҠ” л°ҳмӢ л°ҳмқҳн–Ҳм—ҲлӢӨкі л§җн•ҳкё°лҸ„ н–ҲлӢӨ. м „ м„ёкі„ мһҗлҸҷм°ЁнҡҢмӮ¬л“Өмқҙ лІЁлЎңлӢӨмқёмӮ¬м ң л Ҳмқҙм Җ л ҲмқҙлҚ”м—җ мҮ„лҸ„н•ҳкі мһҲлҠ” кІғмқҖ мһҗмӢ л“Өмқҙ кІҖмҰқн•ҙ мқҳнҳ№мқ„ л¶ҲмӢқн•ҳкІ лӢӨлҠ” мқҳлҜёлҸ„ нҒ¬лӢӨ.
мһҗмңЁ мқҙлҸҷ лЎңлҙҮмқҳ к°ңл°ңм—җм„ң SLAMмқҳ мқҳмқҳлҠ” мӮ¬м „м—җ м§ҖлҸ„м •ліҙлҘј к°–м§Җ м•Ҡкі мӣҖм§Ғмқҙл©ҙм„ң нҳ„мһ¬ мң„м№ҳлҘј м¶”м •н• мҲҳ мһҲлӢӨлҠ” м җм—җ мһҲлӢӨ. н•ҳм§Җл§Ң мһҗмңЁмЈјн–үм°Ём—җм„ңлҠ” м–ҙлҠҗ м •лҸ„ м •нҷ•н•ң 3м°Ёмӣҗ м§ҖлҸ„м •ліҙк°Җ н•„мҡ”н•ҳкІҢ лҗңлӢӨ. мһҗлҸҷм°Ёмқҳ кІҪмҡ°лҠ” л…ёл©ҙмңјлЎңл¶Җн„°мқҳ 진лҸҷмқҙ нҒ¬кі л ҲмқҙлҚ”мқҳ мҳӨм°Ёк°Җ м»Өм§Ҳ мҲҳк°Җ мһҲкё° л•Ңл¬ёмқҙлӢӨ. мҳӨм°Ёк°Җ нҒ° м •ліҙлҘј кё°мӨҖмңјлЎң SLAMмңјлЎң кі„мӮ°н•ҙлҸ„ мһҗм°Ё мң„м№ҳлҘј м •нҷ•н•ҳкІҢ м¶”м •н•ҳлҠ” кІғмқҖ м–ҙл өлӢӨ. DARPAмқҳ кІҪкё°м—җм„ңлҠ” м¶ңл°ң н•ҳлЈЁ м „м—җ м§ҖлҸ„м •ліҙлҘј кұҙл„ӨмЈјм—ҲлӢӨ. лҳҗ кө¬кёҖмӮ¬лҠ” мһҗмӮ¬мқҳ 비мҰҲлӢҲмҠӨм—җ нҷңмҡ©н•ҳкё° мң„н•ҙ мӮ¬м „ мӨҖ비лҗң м§ҖлҸ„мқҳ к°ңл°ңм—җ мЈјл Ҙн•ҳкі мһҲлӢӨ.
м—¬кё°м—җ м •ліҙлҹүмқ„ лҚ”мҡұ мӨ„м—¬лҸ„ л¬ём ңк°Җ м—ҶлҠ” кІғмңјлЎң м•Ңл ӨмЎҢлӢӨ. лІЁлЎңлӢӨмқёмӮ¬лҠ” 2011л…„ л Ҳмқҙм Җ мҶҢмһҗлҘј 32к°ңлЎң л°ҳк°җн•ҙ мёЎм •м җмқ„ 70л§Ңм җмңјлЎң мӨ„мқё HDL-32eлҘј л°ңн‘ңн–ҲлӢӨ. лІЁлЎңлӢӨмқёмӮ¬м—җ л”°лҘҙл©ҙ мһҗмңЁмЈјн–үм—җ н•„мҡ”н•ң м •ліҙлҹүмқҖ мқҙм •лҸ„лЎңлҸ„ 충분н•ҳлӢӨкі н•ңлӢӨ. мқҙлҜё нҶ мҡ”нғҖмҷҖ лӢӣмӮ° л“ұмқҙ кө¬мһ…н•ҙ кІҖмҰқн•ҳкі мһҲлӢӨ. кі„мӮ°мқҳ л¶Җн•ҳлҠ” DARPA л•ҢліҙлӢӨ лҚ”мҡұ м Ғм–ҙмЎҢлӢӨкі . м •ліҙлҹүмқ„ мӨ„мқё л§ҢнҒј CPUк°ҖкІ©мқҙ лӮҙл Өк°Җкё° л•Ңл¬ём—җ мқҙ л¶Җ분м—җ мӨ‘м җмқ„ л‘җкі мһҲлӢӨ.
мөңк·јм—җлҠ” 2~3л…„ нӣ„м—җлҠ” кё°мЎҙ ECU(м „мһҗм ңм–ҙмң лӢӣ)м—җ нғ‘мһ¬н•ҳлҠ” м Җл ҙн•ң л§ҲмқҙмҪҳмңјлЎң лҢҖмқ‘н• мҲҳ мһҲмқ„ кІғ к°ҷлӢӨкі м „л¬ёк°Җл“ӨмқҖ лӮҙлӢӨ ліҙкі мһҲлӢӨ.
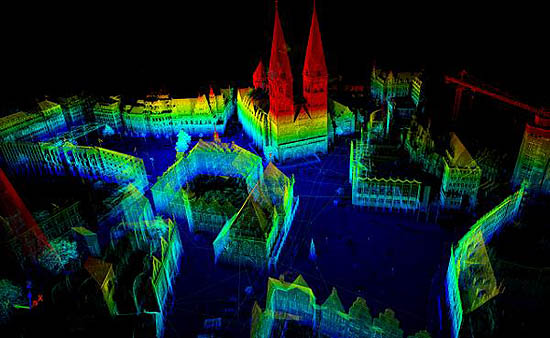
кІҪлЎңлҘј кІ°м •н•ҳл Өл©ҙ мҡ°м„ мЈјн–ү к°ҖлҠҘн•ң кіөк°„мқ„ нҢҢм•…н• н•„мҡ”к°Җ мһҲлӢӨ. мқҙ л¶Җ분м—җ лҢҖн•ң мқјл¶Җ м—°кө¬м—җ л”°лҘҙл©ҙ л ҲмқҙлҚ”лЎң мёЎм •н•ң мЈјліҖ л¬јмІҙмқҳ лҶ’мқҙмҷҖ нҳ•мғҒ л“ұмқҳ м •ліҙлҘј кё°мҙҲлЎң мҡҙм „мқҙ мһҗмң лЎңмҡё мҲҳ мһҲлҠ” мҳҒм—ӯ, мҡҙм „мқҙ к°ҖлҠҘн•ҳлҸ„лЎқ н•ң мҳҒм—ӯ, мһҘн•ҙл¬јмқҳ мҳҒм—ӯ, лҜём§Җмқҳ мҳҒм—ӯмңјлЎң лӮҳлүңлӢӨ. к·ёлҰ¬кі м№ҙл©”лқј л“ұмңјлЎң мһҘн•ҙл¬јмқҳ нҠ№м§•мқ„ к°җм§Җн•ҙ мһҗлҸҷм°ЁмҷҖ мӮ¬лһҢл“ұмңјлЎң 분лҘҳн•ң нӣ„м—җ кІ°кіјлҘј м§ҖлҸ„кіөк°„м—җ мғүмңјлЎң н‘ңмӢңн•ңлӢӨ.
нҳ„мһ¬мқҳ м•Ңкі лҰ¬мҰҳлҸ„ м–ҙлҠҗм •лҸ„ мҲҳмӨҖмқҳ мһҗмңЁмЈјн–үмқ„ лӢ¬м„ұн• мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ м•„м§Ғк№Ңм§ҖлҠ” ліҙмқҙлҠ” мһҘн•ҙл¬јм—җ лҢҖмқ‘н•ҙ м°Ёлҹүмқ„ мӣҖм§ҒмқҙлҠ” мҙҲліҙмһҗ кёүмқҳ мҡҙм „мқҙлқјкі н• мҲҳ мһҲлӢӨ. мөңк·ј к·ёкІғмқ„ лІ н…Ңлһ‘ мҡҙм „мһҗмІҳлҹј ліҙмқҙм§Җ м•ҠлҠ” мң„н—ҳмқ„ кі л Өн•ң мҡҙм „м—җк№Ңм§Җ 진нҷ”мӢңнӮӨкі мһҗ н•ҳлҠ” м—°кө¬к°Җ нҷңл°ңн•ҳкІҢ мқҙлЈЁм–ҙм§Җкі мһҲлӢӨ.
мқјліё лҸҷкІҪлҶҚкіөлҢҖн•ҷлҢҖн•ҷмӣҗ көҗмҲҳлҠ” мҡҙм „н•ҷмӣҗ к°•мӮ¬мқҳ мҡҙм „ мҲҳлІ•мқ„ мӢӨм ңлЎң мЎ°мӮ¬н•ҳкі к·ё кІ°кіјлҘј 집계н•ҙ мқҙкІғмқ„ м •нҳ•нҷ”н–ҲлӢӨ. мқҙ кіөмӢқм—җ л”°лқј мЈјн–ү кіөк°„мқҳ мң„м№ҳм—җ л”°лҘё мң„н—ҳлҸ„мҷҖ мһҗлҸҷм°Ём—җ мҡ”кө¬лҗҳлҠ” к°җмҶҚлҸ„лҘј кі„мӮ°н•ңлӢӨ. к°җмҶҚлҸ„м—җ л”°лқј мһҗлҸҷм°Ёмқҳ мҶҚлҸ„лҘј кІ°м •н•ҳкі мң„н—ҳлҸ„к°Җ лҶ’мқҖ мһҘмҶҢлҘј н”јн•ҳлҸ„лЎқ нғҖк°Ғмқ„ м ңм–ҙн•ңлӢӨ.
ліөмһЎн•ң мӢңмҠӨн…ңмқҙ н•„мҡ”
мһҗмңЁмЈјн–ү мһҗлҸҷм°Ёмқҳ мӢӨмҡ©нҷ”лҘј мң„н•ҙм„ңлҠ” мӢңмҠӨн…ңмқҳ мӢ лў°м„ұмқ„ лҶ’мқҙлҠ” кІғлҸ„ мӨ‘мҡ”н•ҳлӢӨ. к°ҒмӮ¬к°Җ нҠ№нһҲ мҙҲм җмқ„ л§һм¶”кі мһҲлҠ” кІғмқҙ м»ҙн“Ён„° лҳҗлҠ” нҶөмӢ мқҳ мӢ лў°м„ұмқҙлӢӨ. ліөмһЎн•ң мӢңмҠӨн…ңмқҙ н•„мҡ”н•ҳлӢӨлҠ” кІғмқҙлӢӨ.
м§ҖкёҲ к°ңл°ңлҗҳкі мһҲлҠ” мӢӨн—ҳмҡ©м°Ёмқҳ кө¬м„ұмқҖ мқјл°ҳм ҒмңјлЎң м ңм–ҙмҡ©кіј к°җмӢңмҡ© м»ҙн“Ён„°лҘј мӮ¬мҡ©н•ҳлҠ” мқҙмӨ‘кі„лЎң нҶөмӢ м—җлҠ” мһҗлҸҷм°Ё нғ‘мһ¬ LANмқҳ CAN(Controller Area Network)мқ„ мӮ¬мҡ©н•ңлӢӨ. мӢӨмҡ©нҷ”м—җ л”°лқј м§ҖкёҲліҙлӢӨ лҚ” мӢ лў°м„ұмқ„ лҶ’мқё мӢңмҠӨн…ңмқҙ н•„мҡ”н•ҳкІҢ лҗңлӢӨлҠ” кІ¬н•ҙк°Җ к°•н•ҳлӢӨ.
лӢӣмӮ°мқҳ мӢңмҠӨн…ңмқҖ м„ё к°ңмқҳ ECUк°Җ к°Ғк°Ғмқ„ мғҒнҳё к°җмӢңн•ҳлҠ” мӮјмӨ‘кі„лЎң н•ҳкі кё°кі„м Ғмқё л°ұм—… мӢңмҠӨн…ңмқ„ м„Өм№ҳн•ҳкі мһҲлӢӨ. м„ё к°ңлқјл©ҙ лӢӨмҲҳкІ°м—җ мқҳн•ҙ м–ҙлҠҗ ECUк°Җ кі мһҘлӮң кІғмқём§ҖлҘј м•Ң мҲҳ мһҲлӢӨ. л°ҳлҢҖлЎң ECUк°Җ л‘җ к°ңлқјл©ҙ м–ҙлҠҗмӘҪмқҙ кі мһҘлӮ¬лҠ”м§ҖлҠ” м•Ң мҲҳ мһҲм§Җл§Ң к·ё мӨ‘ м–ҙлҠҗмӘҪмқҙ кі мһҘлӮ¬лҠ”м§ҖлҠ” кІ°м •н• мҲҳ м—ҶлӢӨ. кё°кі„м Ғмқё л°ұм—…мқҙлһҖ ECUмҷҖ лӘЁн„° л“ұмқҳ кі мһҘмӢңм—җ нҒҙлҹ¬м№ҳлҘј м—°кІ°н•ҙ мҠӨнӢ°м–ҙл§Ғкіј нғҖмқҙм–ҙлҘј кІ°н•©н•ҳлҠ” кІғмқҙлӢӨ.
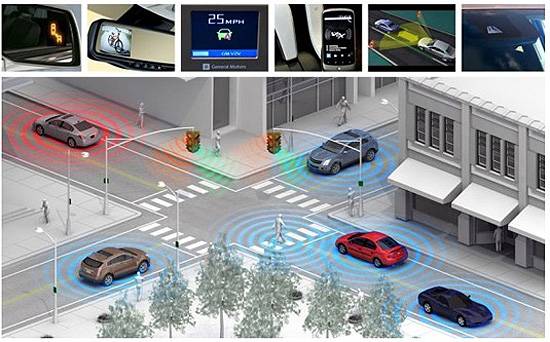
мқјл ¬ мЈјн–үмІҳлҹј мһҗлҸҷм°Ё к°„м—җ л¬ҙм„ нҶөмӢ мқ„ мӮ¬мҡ©н•ҳлҠ” кІҪмҡ°лҠ” лӢӨлҘё нҶөмӢ мҲҳлӢЁмқ„ мӮ¬мҡ©н•ң мқҙмӨ‘кі„лҘј кө¬м¶•н• н•„мҡ”к°Җ мһҲм–ҙ ліҙмқёлӢӨ. л¬ҙм„ нҶөмӢ мқҳ мӢ нҳёлҸ„лӢ¬лҘ мқҖ мң м„ нҶөмӢ ліҙлӢӨ лӮ®лӢӨ.
кёҖ / мұ„мҳҒм„қ (кёҖлЎңлІҢмҳӨнҶ лүҙмҠӨкөӯмһҘ)
мһҗмңЁмЈјн–үмһҗлҸҷм°Ёмқҳ мӢӨнҳ„мқ„ мң„н•ҙм„ңлҠ” лӢӨм–‘н•ң кё°мҲ мқҙ н•„мҡ”н•ҳлӢӨ. '충лҸҢн•ҳм§Җ м•ҠлҠ” мһҗлҸҷм°Ё'лқјлҠ” н‘ңнҳ„мқ„ мӮ¬мҡ©н•ҳлҠ” мқјліёмқҳ кІҪмҡ°м—җм„ң м•Ң мҲҳ мһҲл“Ҝмқҙ м•Ҳм „мқҙ мөң мҡ°м„ мқҙлӢӨ. к·ё м•Ҳм „мқ„ ліҙмһҘн•ҳкё° мң„н•ң кё°мҲ мқҖ мһҗлҸҷм°Ё мһҗмІҙм—җ м№ҙл©”лқјмҷҖ л ҲмқҙлҚ”, м„јм„ң л“ұмқ„ м„Өм№ҳн•ҙ мЈјліҖмқҳ лӢӨлҘё мһҗлҸҷм°ЁлӮҳ мһҘн•ҙл¬јмқ„ к°җм§Җн•ҳлҠ” кІғмқҙ мҡ°м„ мқҙлӢӨ. мқҙ л¶Җ분к№Ңм§ҖлҠ” мғҒлӢ№н•ң л°ңм „мқҙ мқҙлЈЁм–ҙм ё мһҲлӢӨ.
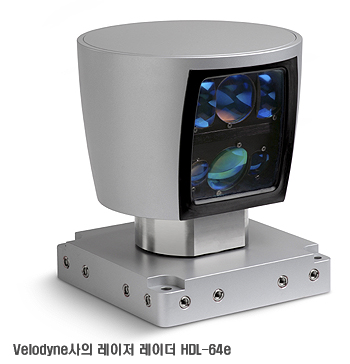
мқҙ м„јм„ңлҠ” мһҗлҸҷм°Ёмқҳ м•„лһҳмӘҪм—җ м„Өкі„н•ҙ мЈјліҖ 360лҸ„м—җ мҲҳм§Ғ мӢңм•ј 26.8лҸ„мқҳ 3м°Ёмӣҗ кіөк°„м—җ мһҲлҠ” л¬јмІҙмҷҖ кұ°лҰ¬лҘј мёЎм •н•ңлӢӨ. мӣҗнҶө мӨ‘м—җ л Ҳмқҙм Җ мҶҢмһҗлҘј м„ёлЎңлЎң 64к°ң м„Өм№ҳн•ҙ м•Ҫ 20Hzмқҳ мЈјкё°лЎң н•ҙ мӢӨнҳ„н•ңлӢӨ.
л¬ҙм—ҮліҙлӢӨ мӨ‘мҡ”н•ң кІғмқҖ мһҗм°Ёмқҳ мң„м№ҳлҘј м •нҷ•н•ҳкІҢ м¶”м •н•ҳлҠ” кІғмқҙлӢӨ. кіјкұ° мһҗлҸҷм°ЁнҡҢмӮ¬л“Өмқҳ м—°кө¬ лҢҖл¶Җ분мқҙ мҳҲлҘј л“Өл©ҙ лҸ„лЎңм—җмқҳ л§Ҳм»Ө м„Өм№ҳмҷҖ GPSмқҳ м •л°ҖлҸ„лҘј лҶ’мқҙлҠ” л“ұ мқён”„лқјмқҳ ліҖкІҪмқ„ м „м ңлЎң н•ҙ мһҗм°Ё мң„м№ҳлҘј м¶”м •н•ҙ мҷ”лӢӨ. лҸ„лЎңмҷҖ GPS мң„м„ұмқҳ ліҖкІҪм—җлҠ” кұ°м•Ўмқҳ мһҗкёҲмқҙ н•„мҡ”лЎңн•ҳкі кіөкіөл¬јмқҙкё° л•Ңл¬ём—җ н•ң кё°м—…мңјлЎңм„ңлҠ” 추진н•ҳкё° м–ҙл өлӢӨ. кІ°көӯ м—°кө¬н•ң м„ұкіјлҠ” мӢӨнҳ„мқҙ мҡ©мқҙн•ҳм§Җ м•ҠлӢӨлҠ” кІ°лЎ м—җ лҸ„лӢ¬н–ҲлӢӨ.

к·ёлһҳлҸ„ мһҗлҸҷм°ЁнҡҢмӮ¬л“Ө мӮ¬мқҙм—җм„ңлҠ” мқён”„лқјк°Җ н•„мҡ”н•ҳлӢӨлҠ” мғқк°Ғмқҙ к°•н•ҙ м–ҙлҠҗ кё°мҲ мһҗлҠ” лӢ№мҙҲм—җлҠ” л°ҳмӢ л°ҳмқҳн–Ҳм—ҲлӢӨкі л§җн•ҳкё°лҸ„ н–ҲлӢӨ. м „ м„ёкі„ мһҗлҸҷм°ЁнҡҢмӮ¬л“Өмқҙ лІЁлЎңлӢӨмқёмӮ¬м ң л Ҳмқҙм Җ л ҲмқҙлҚ”м—җ мҮ„лҸ„н•ҳкі мһҲлҠ” кІғмқҖ мһҗмӢ л“Өмқҙ кІҖмҰқн•ҙ мқҳнҳ№мқ„ л¶ҲмӢқн•ҳкІ лӢӨлҠ” мқҳлҜёлҸ„ нҒ¬лӢӨ.
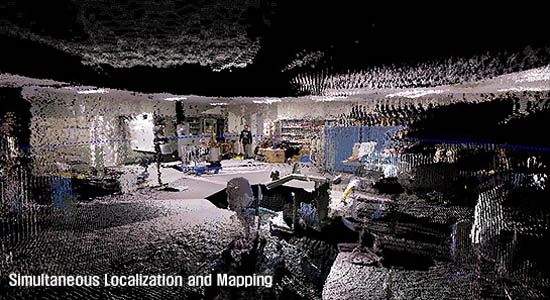
мһҗмңЁ мқҙлҸҷ лЎңлҙҮмқҳ к°ңл°ңм—җм„ң SLAMмқҳ мқҳмқҳлҠ” мӮ¬м „м—җ м§ҖлҸ„м •ліҙлҘј к°–м§Җ м•Ҡкі мӣҖм§Ғмқҙл©ҙм„ң нҳ„мһ¬ мң„м№ҳлҘј м¶”м •н• мҲҳ мһҲлӢӨлҠ” м җм—җ мһҲлӢӨ. н•ҳм§Җл§Ң мһҗмңЁмЈјн–үм°Ём—җм„ңлҠ” м–ҙлҠҗ м •лҸ„ м •нҷ•н•ң 3м°Ёмӣҗ м§ҖлҸ„м •ліҙк°Җ н•„мҡ”н•ҳкІҢ лҗңлӢӨ. мһҗлҸҷм°Ёмқҳ кІҪмҡ°лҠ” л…ёл©ҙмңјлЎңл¶Җн„°мқҳ 진лҸҷмқҙ нҒ¬кі л ҲмқҙлҚ”мқҳ мҳӨм°Ёк°Җ м»Өм§Ҳ мҲҳк°Җ мһҲкё° л•Ңл¬ёмқҙлӢӨ. мҳӨм°Ёк°Җ нҒ° м •ліҙлҘј кё°мӨҖмңјлЎң SLAMмңјлЎң кі„мӮ°н•ҙлҸ„ мһҗм°Ё мң„м№ҳлҘј м •нҷ•н•ҳкІҢ м¶”м •н•ҳлҠ” кІғмқҖ м–ҙл өлӢӨ. DARPAмқҳ кІҪкё°м—җм„ңлҠ” м¶ңл°ң н•ҳлЈЁ м „м—җ м§ҖлҸ„м •ліҙлҘј кұҙл„ӨмЈјм—ҲлӢӨ. лҳҗ кө¬кёҖмӮ¬лҠ” мһҗмӮ¬мқҳ 비мҰҲлӢҲмҠӨм—җ нҷңмҡ©н•ҳкё° мң„н•ҙ мӮ¬м „ мӨҖ비лҗң м§ҖлҸ„мқҳ к°ңл°ңм—җ мЈјл Ҙн•ҳкі мһҲлӢӨ.

м—¬кё°м—җ м •ліҙлҹүмқ„ лҚ”мҡұ мӨ„м—¬лҸ„ л¬ём ңк°Җ м—ҶлҠ” кІғмңјлЎң м•Ңл ӨмЎҢлӢӨ. лІЁлЎңлӢӨмқёмӮ¬лҠ” 2011л…„ л Ҳмқҙм Җ мҶҢмһҗлҘј 32к°ңлЎң л°ҳк°җн•ҙ мёЎм •м җмқ„ 70л§Ңм җмңјлЎң мӨ„мқё HDL-32eлҘј л°ңн‘ңн–ҲлӢӨ. лІЁлЎңлӢӨмқёмӮ¬м—җ л”°лҘҙл©ҙ мһҗмңЁмЈјн–үм—җ н•„мҡ”н•ң м •ліҙлҹүмқҖ мқҙм •лҸ„лЎңлҸ„ 충분н•ҳлӢӨкі н•ңлӢӨ. мқҙлҜё нҶ мҡ”нғҖмҷҖ лӢӣмӮ° л“ұмқҙ кө¬мһ…н•ҙ кІҖмҰқн•ҳкі мһҲлӢӨ. кі„мӮ°мқҳ л¶Җн•ҳлҠ” DARPA л•ҢліҙлӢӨ лҚ”мҡұ м Ғм–ҙмЎҢлӢӨкі . м •ліҙлҹүмқ„ мӨ„мқё л§ҢнҒј CPUк°ҖкІ©мқҙ лӮҙл Өк°Җкё° л•Ңл¬ём—җ мқҙ л¶Җ분м—җ мӨ‘м җмқ„ л‘җкі мһҲлӢӨ.
мөңк·јм—җлҠ” 2~3л…„ нӣ„м—җлҠ” кё°мЎҙ ECU(м „мһҗм ңм–ҙмң лӢӣ)м—җ нғ‘мһ¬н•ҳлҠ” м Җл ҙн•ң л§ҲмқҙмҪҳмңјлЎң лҢҖмқ‘н• мҲҳ мһҲмқ„ кІғ к°ҷлӢӨкі м „л¬ёк°Җл“ӨмқҖ лӮҙлӢӨ ліҙкі мһҲлӢӨ.
кІҪлЎңлҘј кІ°м •н•ҳл Өл©ҙ мҡ°м„ мЈјн–ү к°ҖлҠҘн•ң кіөк°„мқ„ нҢҢм•…н• н•„мҡ”к°Җ мһҲлӢӨ. мқҙ л¶Җ분м—җ лҢҖн•ң мқјл¶Җ м—°кө¬м—җ л”°лҘҙл©ҙ л ҲмқҙлҚ”лЎң мёЎм •н•ң мЈјліҖ л¬јмІҙмқҳ лҶ’мқҙмҷҖ нҳ•мғҒ л“ұмқҳ м •ліҙлҘј кё°мҙҲлЎң мҡҙм „мқҙ мһҗмң лЎңмҡё мҲҳ мһҲлҠ” мҳҒм—ӯ, мҡҙм „мқҙ к°ҖлҠҘн•ҳлҸ„лЎқ н•ң мҳҒм—ӯ, мһҘн•ҙл¬јмқҳ мҳҒм—ӯ, лҜём§Җмқҳ мҳҒм—ӯмңјлЎң лӮҳлүңлӢӨ. к·ёлҰ¬кі м№ҙл©”лқј л“ұмңјлЎң мһҘн•ҙл¬јмқҳ нҠ№м§•мқ„ к°җм§Җн•ҙ мһҗлҸҷм°ЁмҷҖ мӮ¬лһҢл“ұмңјлЎң 분лҘҳн•ң нӣ„м—җ кІ°кіјлҘј м§ҖлҸ„кіөк°„м—җ мғүмңјлЎң н‘ңмӢңн•ңлӢӨ.
нҳ„мһ¬мқҳ м•Ңкі лҰ¬мҰҳлҸ„ м–ҙлҠҗм •лҸ„ мҲҳмӨҖмқҳ мһҗмңЁмЈјн–үмқ„ лӢ¬м„ұн• мҲҳ мһҲлӢӨ. к·ёлҹ¬лӮҳ м•„м§Ғк№Ңм§ҖлҠ” ліҙмқҙлҠ” мһҘн•ҙл¬јм—җ лҢҖмқ‘н•ҙ м°Ёлҹүмқ„ мӣҖм§ҒмқҙлҠ” мҙҲліҙмһҗ кёүмқҳ мҡҙм „мқҙлқјкі н• мҲҳ мһҲлӢӨ. мөңк·ј к·ёкІғмқ„ лІ н…Ңлһ‘ мҡҙм „мһҗмІҳлҹј ліҙмқҙм§Җ м•ҠлҠ” мң„н—ҳмқ„ кі л Өн•ң мҡҙм „м—җк№Ңм§Җ 진нҷ”мӢңнӮӨкі мһҗ н•ҳлҠ” м—°кө¬к°Җ нҷңл°ңн•ҳкІҢ мқҙлЈЁм–ҙм§Җкі мһҲлӢӨ.
мқјліё лҸҷкІҪлҶҚкіөлҢҖн•ҷлҢҖн•ҷмӣҗ көҗмҲҳлҠ” мҡҙм „н•ҷмӣҗ к°•мӮ¬мқҳ мҡҙм „ мҲҳлІ•мқ„ мӢӨм ңлЎң мЎ°мӮ¬н•ҳкі к·ё кІ°кіјлҘј 집계н•ҙ мқҙкІғмқ„ м •нҳ•нҷ”н–ҲлӢӨ. мқҙ кіөмӢқм—җ л”°лқј мЈјн–ү кіөк°„мқҳ мң„м№ҳм—җ л”°лҘё мң„н—ҳлҸ„мҷҖ мһҗлҸҷм°Ём—җ мҡ”кө¬лҗҳлҠ” к°җмҶҚлҸ„лҘј кі„мӮ°н•ңлӢӨ. к°җмҶҚлҸ„м—җ л”°лқј мһҗлҸҷм°Ёмқҳ мҶҚлҸ„лҘј кІ°м •н•ҳкі мң„н—ҳлҸ„к°Җ лҶ’мқҖ мһҘмҶҢлҘј н”јн•ҳлҸ„лЎқ нғҖк°Ғмқ„ м ңм–ҙн•ңлӢӨ.
ліөмһЎн•ң мӢңмҠӨн…ңмқҙ н•„мҡ”
мһҗмңЁмЈјн–ү мһҗлҸҷм°Ёмқҳ мӢӨмҡ©нҷ”лҘј мң„н•ҙм„ңлҠ” мӢңмҠӨн…ңмқҳ мӢ лў°м„ұмқ„ лҶ’мқҙлҠ” кІғлҸ„ мӨ‘мҡ”н•ҳлӢӨ. к°ҒмӮ¬к°Җ нҠ№нһҲ мҙҲм җмқ„ л§һм¶”кі мһҲлҠ” кІғмқҙ м»ҙн“Ён„° лҳҗлҠ” нҶөмӢ мқҳ мӢ лў°м„ұмқҙлӢӨ. ліөмһЎн•ң мӢңмҠӨн…ңмқҙ н•„мҡ”н•ҳлӢӨлҠ” кІғмқҙлӢӨ.
м§ҖкёҲ к°ңл°ңлҗҳкі мһҲлҠ” мӢӨн—ҳмҡ©м°Ёмқҳ кө¬м„ұмқҖ мқјл°ҳм ҒмңјлЎң м ңм–ҙмҡ©кіј к°җмӢңмҡ© м»ҙн“Ён„°лҘј мӮ¬мҡ©н•ҳлҠ” мқҙмӨ‘кі„лЎң нҶөмӢ м—җлҠ” мһҗлҸҷм°Ё нғ‘мһ¬ LANмқҳ CAN(Controller Area Network)мқ„ мӮ¬мҡ©н•ңлӢӨ. мӢӨмҡ©нҷ”м—җ л”°лқј м§ҖкёҲліҙлӢӨ лҚ” мӢ лў°м„ұмқ„ лҶ’мқё мӢңмҠӨн…ңмқҙ н•„мҡ”н•ҳкІҢ лҗңлӢӨлҠ” кІ¬н•ҙк°Җ к°•н•ҳлӢӨ.

лӢӣмӮ°мқҳ мӢңмҠӨн…ңмқҖ м„ё к°ңмқҳ ECUк°Җ к°Ғк°Ғмқ„ мғҒнҳё к°җмӢңн•ҳлҠ” мӮјмӨ‘кі„лЎң н•ҳкі кё°кі„м Ғмқё л°ұм—… мӢңмҠӨн…ңмқ„ м„Өм№ҳн•ҳкі мһҲлӢӨ. м„ё к°ңлқјл©ҙ лӢӨмҲҳкІ°м—җ мқҳн•ҙ м–ҙлҠҗ ECUк°Җ кі мһҘлӮң кІғмқём§ҖлҘј м•Ң мҲҳ мһҲлӢӨ. л°ҳлҢҖлЎң ECUк°Җ л‘җ к°ңлқјл©ҙ м–ҙлҠҗмӘҪмқҙ кі мһҘлӮ¬лҠ”м§ҖлҠ” м•Ң мҲҳ мһҲм§Җл§Ң к·ё мӨ‘ м–ҙлҠҗмӘҪмқҙ кі мһҘлӮ¬лҠ”м§ҖлҠ” кІ°м •н• мҲҳ м—ҶлӢӨ. кё°кі„м Ғмқё л°ұм—…мқҙлһҖ ECUмҷҖ лӘЁн„° л“ұмқҳ кі мһҘмӢңм—җ нҒҙлҹ¬м№ҳлҘј м—°кІ°н•ҙ мҠӨнӢ°м–ҙл§Ғкіј нғҖмқҙм–ҙлҘј кІ°н•©н•ҳлҠ” кІғмқҙлӢӨ.

мқјл ¬ мЈјн–үмІҳлҹј мһҗлҸҷм°Ё к°„м—җ л¬ҙм„ нҶөмӢ мқ„ мӮ¬мҡ©н•ҳлҠ” кІҪмҡ°лҠ” лӢӨлҘё нҶөмӢ мҲҳлӢЁмқ„ мӮ¬мҡ©н•ң мқҙмӨ‘кі„лҘј кө¬м¶•н• н•„мҡ”к°Җ мһҲм–ҙ ліҙмқёлӢӨ. л¬ҙм„ нҶөмӢ мқҳ мӢ нҳёлҸ„лӢ¬лҘ мқҖ мң м„ нҶөмӢ ліҙлӢӨ лӮ®лӢӨ.
