

대형차량의 자동운전 기술
페이지 정보
글 : 채영석(webmaster@global-autonews.com)|
|
승인 2013-08-29 15:50:49 |



본문

1. 서론
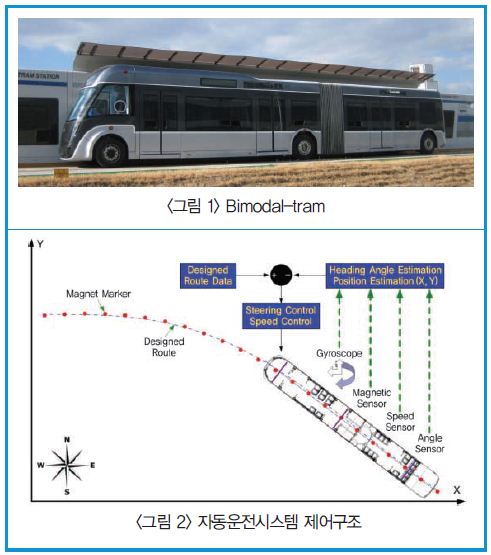
대형 자동운전 교통수송수단으로 개발된 Bimodal-tram은 차량의 자동운전을 위해 Navigation control system(NCS)을 장착하고 있다. 운전자와 승객의 편의를 위해 이 시스템이 적용되고, 교통신호체계와 차량 간 실시간 연계되어 효율적이고 안정된 운행이 이루어지려면 운전자의 판단과 운전능력에 의존해서는 곤란하기 때문에 이를 통제하고 제어하기 위한 자동제어시스템이 개발되었다. 여기서 NCS의 주요한 기능은 차량의 실시간 위치추정을 기반으로 계획된 기준경로를 주행하도록 자동조향제어를 수행함과 동시에 각 위치에서 정해진 속도를 주행하여 목표하는 정차지점에 정시에 도착하게 함으로써 도시철도차량과 같은 정도의 정시간, 정위치 정차제어를 수행한다.
이를 위해서 NCS는 최첨단 제어계측, HMI(Human-machine Interface)기술, 신호처리 및 통신기술,네트워크 및 소프트웨어 기술 등이 복합적으로 요구되고 있으며, 이 차량은 고무차륜으로 구성된 3축 6바퀴의 1굴절 2량 1편성 차량으로 길이가 18m이다. 이 차량은 일반 도로에서 타 차량들과 혼용하여 운용될 수 있고 전용도로를 구축하여 독립적으로 운영할 수도 있다. 도로에 적은 투자비용으로 차량자동운행을 위한 시스템을 구축할 수 있다.
2. 국내외 관련 기술 연구동향
국내에서도 소형 승용차, SUV, 산업용 자동주행차량(Automatic Guided Vehicle: AGV)에 대한 연구는학계, 연구소 등에서 수행되고 있으나 대형 대중교통수단을 대상으로 하는 자동운전시스템에 대한 연구는 바이모달트램이 최초의 시도이다. 네덜란드 APTS에 의해 개발된 Phileas와 미국의 PATH연구소에서 Magnetic Marker를 이용한 자동운전시스템 연구를 진행한 바 있다
여러 방식 중 Magnetic Marker를 이용한 자동운행시스템은 비교된 타 시스템에 비해 기후 및 환경조건에 영향을 받지 않고 유지보수 및 운영인프라구축 비용이 낮기 때문에 주목받는 시스템이다.
3. 바이모달트램의 특징
바이모달트램은 초저상 굴절차량으로 개발되어 차량승하차시 계단이 없어, 지하철처럼 승객의 수평 승하차가 가능하며 노약자 및 휠체어, 유모차의 수용이 가능하도록 설계되었다. 추진장치는 CNG Hybrid 시스템으로 친환경적이고 연료를 절감할 수 있다. 차량의 각 바퀴 축은 전체 조향(All Wheel Steering)제어가 가능하여 12m 회전반경을 통과할 수 있다. 차량의 차체는 복합소재 차제로 차량의 무게를 감소시킬 수 있다.
4. 바이모달트램의 자동운전시스템
바이모달트램은 자동운전을 위해 자석마커가 매설된 주행경로를 운행해야 한다. 자석의 설치에는 큰 제약 조건이 없다. 즉 최소 1m에서 최대 5m 사이의 임의 간격으로 자유롭게 설치할 수 있으며 기준 주행경로의 중심에 설치할 필요도 없어 지그재그 형식의 설치가 가능하다. 단 매설된 자석의 각 위치는 5mm 이내의 위치정밀도를 갖는 측정시스템에 의해 절대 좌표가 계측되고 데이터베이스화 되어야 한다.
그림 2와 같이 차량 하부에 설치된 자석검지센서는 주행 중 도로에 매설된 자석의 검지 위치를 측정하고 차량의 각 변동 위치에 설치된 센서들은 각 변동분(바퀴회전수, 조향변동각, 자이로변동각, 굴절각 등)을 계측하여 NCS로 전송한다. NCS는 이를 바탕으로 차량의 제어 점의 절대위치좌표와 절대방위각을 계산한다. 이 위치와 방위는 기준경로 좌표 점과 비교되고 이 차이가 최소화 되도록 조향제어가 수행된다. 기준경로
의 각 위치에는 목표속도가 정해져있어 차량이 이 속도를 유지하도록 추진제어장치와 제동장치가 제어된다.
4.1 자동운전시스템 구성
4.1.1 자동운전시스템을 위한 H/W구성
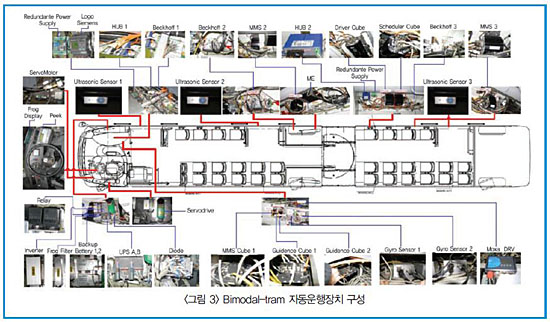
바이모달트램의 자동운전시스템은 다양한 장치들로 구성된다. 제일 하부에 차량움직임을 계측하기 위한 센서들과 이들 센서들의 정보를 전송하기 위한 통신시스템, 정보를 수집하고 연산하기 위한 제어컴퓨터들과 연산된 제어지령에 따라 동작하기 위한 각 구동장치들로 구성된다. 그림 3은 자동운전시스템 구성품 배치도이다.
4.1.2 자동운전시스템 S/W 구조
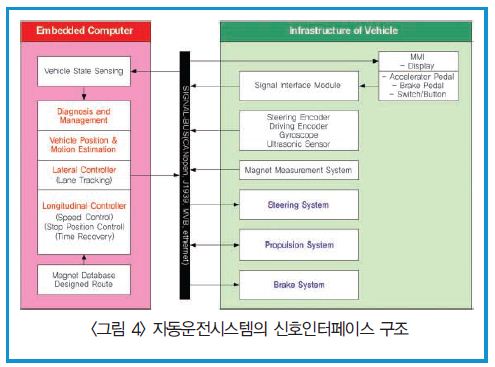
자동운전시스템의 각 H/W장치들은 통신라인을 통해 자동운전 제어 컴퓨터(Embedded Computer)와 그림 4와 같이 연결되어 있다. 자동운전제어 컴퓨터는 차량에 설치되 각종 센서신호를 수집한다. 수집된 정보 중 장치나 신호의 이상 유무를 판단하고 보정하여 차량의 모션을 예측하고 차량의 현재위치를 계산한다. 종/횡방향 제어기는 현재위치를 기준으로 목표위치와 목표속도에 따르는 제어 조작량을 계산한다. 이 계산된 제어량은 각 하부의 조향제어시스템, 추진제어시스템, 제동제어시스템에 전송된다.
4.1.3 주행기준경로 설계
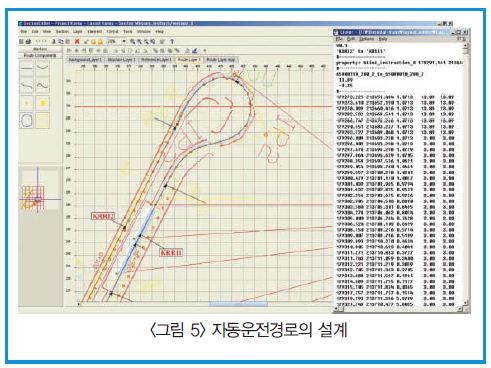
차량 자동운전을 위해서는 차량 기준주행 경로가 설계되어야 한다. 그림 5와 같이 우
선 차량이 운행되어야 할 2차원 평면의 위/경도 좌표로 설계된 도면 CAD파일이 필요하
다. 도면파일을 설계 Tool 상에서 열어서 주행 기준라인을 설계한다. 기준라인은 횡가속도 제한, 속도제한, 정거장 등이 설정된다. 이렇게 설계되면 이 기준 경로에 대한 절대 좌표 점을 추출하여 데이터베이스 파일을 만들고 이 파일은 자동운전컴퓨터에서 활용된다.
5. 자동운전시험 선로
바이모달트램의 시험을 위해 전용시험선로가 구축되었으며 시험선 1회전시 노선의 길이는 476m이며 주행로의 중심에는 자석마커가 설치되었다. 자석마커는 위치초기화를 위한 2개소구간에 1m 간격으로 11개가 설치되었고 그 외 구간은 4.5m간격으로 설치되어있다. 2개소의 정차구간, 1개소의 트램승강장, 12m 반경회전부 2개소가 존재한다.
도로의 자석마커는 설계된 자석극성 배치에 따라 각 지점에 설치된다. 도로에 설치된 자석마커의 각 절대위치좌표는 정밀한 계측장비(±5mm)를 사용하여 데이터베이스화 되어야 한다.
6. 바이모달트램 자동주행제어
차량자동주행은 차량이 자기위치를 인식한 이후부터 가능하다. 그러기 위해서 차량은 초기 수동운전으로 자석마커의 초기화 지점을 지나쳐야한다. 차량이 초기화 지점을 지나치고 자동운전시스템이 차량초기위치확인이 끝나면 자동운전 모니터 창에 자동운전가능 메시지(Auto Possible)가 현시된다. 이 상태에서 운전자가 자동운전버튼을 누르면 자동운전시스템은 자동운전을 시작한다. 이때부터 차량은 자동속도제어, 자동주행위치제어, 자동정위치 정밀정차를 수행한다.
6.1 자동속도제어
자동운전시스템은 차량의 주행위치에 따른 제한속도를 설계된 기준경로 파일로부터 참조하고 곡선부 및 정차 점을 고려하여 기준속도 프로파일을 생성하고 이에 따른 차량속도제어를 수행하기 위해 요구되는 구동토크 지령을 추진장치에 하달한다. 또한 속도의 감속을 위하여 제동부의 제동토크를 제어한다.
6.2 자동위치(조향) 제어
자동운전시스템은 정밀하게 설계된 기준 주행경로파일을 갖고 있다. 기준 주행경로파일은 차량이 지정된 노선에서 따라 가야할 이동 경로이다. 이 파일은 특정한 프로그램에 의해 설계되며 주행 도로 CAD 데이터를 기반으로 차량의 주행기준노선, 구간제한속도, 최대허용속도, 정차지점 등이 설정된다. 자동운전시스템의 계산된 차량의 실시간 위치와 기준경로의 2차원 평면 오차가“0”이 되도록 즉 차량상의 일정 기준점이 기준 경로상에 위치하도록 차량 바퀴의 조향각을 제어한다.
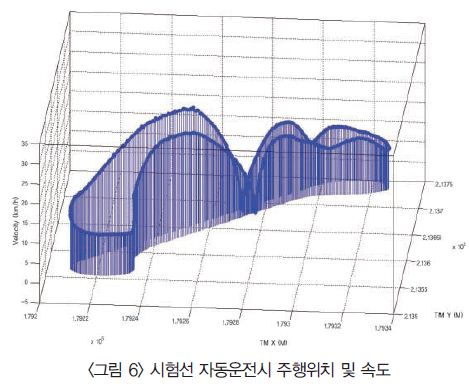
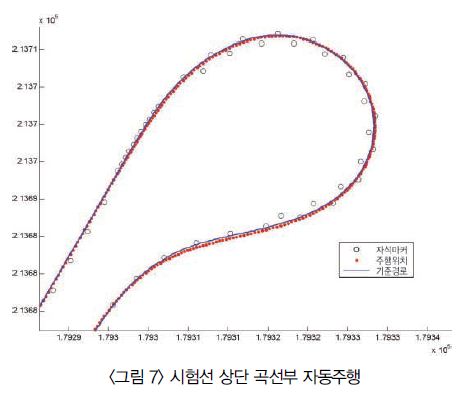
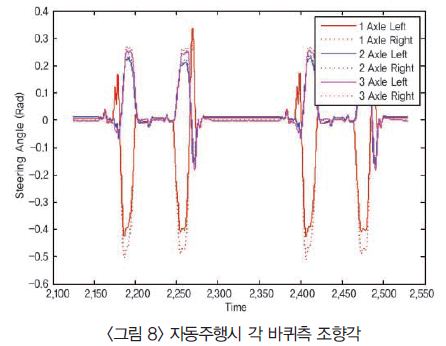
그림 7은 자동운전 차량이 12m 반지름 곡선주행부를 기준경로를 따라 주행하고 있다. 바이모달트램은 3축바퀴가 조향되는 1굴절차량이다. 그림 8은 자동운전상태에서 각 바퀴의 조향각 변동 상태를 보여준다.
6.3 자동정밀정차 제어
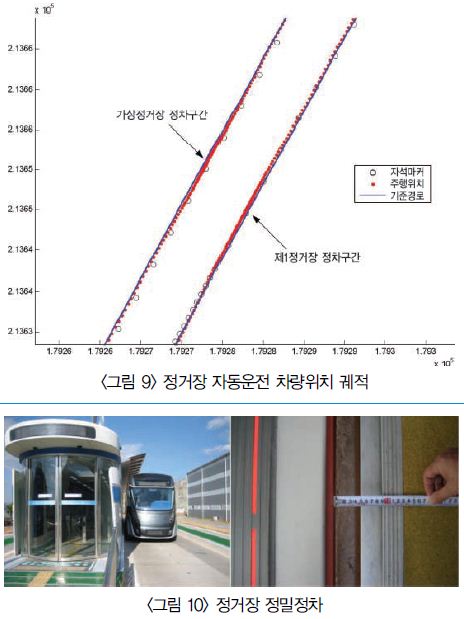
자동운전 모드에서 차량은 정거장에 도달하기 전 일정거리 전방에서 자동적으로 제동을 시작한다. 종방향정차지점에서 ±10cm내에 정차하며 승강장과 차량측면 간격은 10cm 간격을 기준으로 ±2cm를 유지하여 휠체어 및 승객의 승하차를 편리하고 안전하게 할 수 있다. 그림 9는 정거장 정차시 주행궤적이다.
값을 이용한다. 즉 주행 기준경로에서 우측 30cm 편차 방식으로 횡방향 이동(Crab
Way)한다. 정거장에서 차량의 각 축 바퀴가 같은 방향으로 평행 조향되어 이동함으로 짧은 정거장정차 거리를 이용할 수 있다. 그림 9는 정거장영역에서 기준주행로와 편차를 두어 자동정차한 차량의 주행궤적을 보여준다. 정거장 정차 후 출발하면 차량의 기준경로로 복귀하여 주행하게 된다.
그림 10은 차량 정거장 정밀정차 시연장면과 측면간격 측정 장면을 보여준다. 사진
의 검정라인은 차량과 정거장의 각 정차 기준선을 표시한다.
7. 결론
버스와 지하철이 갖는 장점을 갖는 바이모달트램이 개발되었고 여기에서 개발된 자동운전시스템기술은 산업계의 공장물류 및 항만자동물류 운송 자동화 및 PRT(Personal Rapid Transit) 등 자동운행을 요하는 차량시스템에 적용 및 응용될 수 있는 핵심기술로 국내자체 기술로 개발 시험되었다.
이 차량은 두 운송수단이 갖는 유리한 특징 중 버스의 접근성 및 운영의 유연성과 철도시스템이 갖는 정시성 및 효율성을 갖도록 할 수 있는 시스템으로 기존의 대형 운송시스템인 철도와 버스의 중간적인 역할을 수행하면서 보다 저렴한 비용으로 대중교통 시스템을 구축하여 대 국민서비스에 이용될 수 있을 것으로 기대한다.
대형 자동운전 교통수송수단으로 개발된 Bimodal-tram은 차량의 자동운전을 위해 Navigation control system(NCS)을 장착하고 있다. 운전자와 승객의 편의를 위해 이 시스템이 적용되고, 교통신호체계와 차량 간 실시간 연계되어 효율적이고 안정된 운행이 이루어지려면 운전자의 판단과 운전능력에 의존해서는 곤란하기 때문에 이를 통제하고 제어하기 위한 자동제어시스템이 개발되었다. 여기서 NCS의 주요한 기능은 차량의 실시간 위치추정을 기반으로 계획된 기준경로를 주행하도록 자동조향제어를 수행함과 동시에 각 위치에서 정해진 속도를 주행하여 목표하는 정차지점에 정시에 도착하게 함으로써 도시철도차량과 같은 정도의 정시간, 정위치 정차제어를 수행한다.
이를 위해서 NCS는 최첨단 제어계측, HMI(Human-machine Interface)기술, 신호처리 및 통신기술,네트워크 및 소프트웨어 기술 등이 복합적으로 요구되고 있으며, 이 차량은 고무차륜으로 구성된 3축 6바퀴의 1굴절 2량 1편성 차량으로 길이가 18m이다. 이 차량은 일반 도로에서 타 차량들과 혼용하여 운용될 수 있고 전용도로를 구축하여 독립적으로 운영할 수도 있다. 도로에 적은 투자비용으로 차량자동운행을 위한 시스템을 구축할 수 있다.
2. 국내외 관련 기술 연구동향
국내에서도 소형 승용차, SUV, 산업용 자동주행차량(Automatic Guided Vehicle: AGV)에 대한 연구는학계, 연구소 등에서 수행되고 있으나 대형 대중교통수단을 대상으로 하는 자동운전시스템에 대한 연구는 바이모달트램이 최초의 시도이다. 네덜란드 APTS에 의해 개발된 Phileas와 미국의 PATH연구소에서 Magnetic Marker를 이용한 자동운전시스템 연구를 진행한 바 있다
여러 방식 중 Magnetic Marker를 이용한 자동운행시스템은 비교된 타 시스템에 비해 기후 및 환경조건에 영향을 받지 않고 유지보수 및 운영인프라구축 비용이 낮기 때문에 주목받는 시스템이다.
3. 바이모달트램의 특징
바이모달트램은 초저상 굴절차량으로 개발되어 차량승하차시 계단이 없어, 지하철처럼 승객의 수평 승하차가 가능하며 노약자 및 휠체어, 유모차의 수용이 가능하도록 설계되었다. 추진장치는 CNG Hybrid 시스템으로 친환경적이고 연료를 절감할 수 있다. 차량의 각 바퀴 축은 전체 조향(All Wheel Steering)제어가 가능하여 12m 회전반경을 통과할 수 있다. 차량의 차체는 복합소재 차제로 차량의 무게를 감소시킬 수 있다.
4. 바이모달트램의 자동운전시스템
바이모달트램은 자동운전을 위해 자석마커가 매설된 주행경로를 운행해야 한다. 자석의 설치에는 큰 제약 조건이 없다. 즉 최소 1m에서 최대 5m 사이의 임의 간격으로 자유롭게 설치할 수 있으며 기준 주행경로의 중심에 설치할 필요도 없어 지그재그 형식의 설치가 가능하다. 단 매설된 자석의 각 위치는 5mm 이내의 위치정밀도를 갖는 측정시스템에 의해 절대 좌표가 계측되고 데이터베이스화 되어야 한다.
그림 2와 같이 차량 하부에 설치된 자석검지센서는 주행 중 도로에 매설된 자석의 검지 위치를 측정하고 차량의 각 변동 위치에 설치된 센서들은 각 변동분(바퀴회전수, 조향변동각, 자이로변동각, 굴절각 등)을 계측하여 NCS로 전송한다. NCS는 이를 바탕으로 차량의 제어 점의 절대위치좌표와 절대방위각을 계산한다. 이 위치와 방위는 기준경로 좌표 점과 비교되고 이 차이가 최소화 되도록 조향제어가 수행된다. 기준경로
의 각 위치에는 목표속도가 정해져있어 차량이 이 속도를 유지하도록 추진제어장치와 제동장치가 제어된다.
4.1 자동운전시스템 구성
4.1.1 자동운전시스템을 위한 H/W구성
바이모달트램의 자동운전시스템은 다양한 장치들로 구성된다. 제일 하부에 차량움직임을 계측하기 위한 센서들과 이들 센서들의 정보를 전송하기 위한 통신시스템, 정보를 수집하고 연산하기 위한 제어컴퓨터들과 연산된 제어지령에 따라 동작하기 위한 각 구동장치들로 구성된다. 그림 3은 자동운전시스템 구성품 배치도이다.
4.1.2 자동운전시스템 S/W 구조
자동운전시스템의 각 H/W장치들은 통신라인을 통해 자동운전 제어 컴퓨터(Embedded Computer)와 그림 4와 같이 연결되어 있다. 자동운전제어 컴퓨터는 차량에 설치되 각종 센서신호를 수집한다. 수집된 정보 중 장치나 신호의 이상 유무를 판단하고 보정하여 차량의 모션을 예측하고 차량의 현재위치를 계산한다. 종/횡방향 제어기는 현재위치를 기준으로 목표위치와 목표속도에 따르는 제어 조작량을 계산한다. 이 계산된 제어량은 각 하부의 조향제어시스템, 추진제어시스템, 제동제어시스템에 전송된다.
4.1.3 주행기준경로 설계
차량 자동운전을 위해서는 차량 기준주행 경로가 설계되어야 한다. 그림 5와 같이 우
선 차량이 운행되어야 할 2차원 평면의 위/경도 좌표로 설계된 도면 CAD파일이 필요하
다. 도면파일을 설계 Tool 상에서 열어서 주행 기준라인을 설계한다. 기준라인은 횡가속도 제한, 속도제한, 정거장 등이 설정된다. 이렇게 설계되면 이 기준 경로에 대한 절대 좌표 점을 추출하여 데이터베이스 파일을 만들고 이 파일은 자동운전컴퓨터에서 활용된다.
5. 자동운전시험 선로
바이모달트램의 시험을 위해 전용시험선로가 구축되었으며 시험선 1회전시 노선의 길이는 476m이며 주행로의 중심에는 자석마커가 설치되었다. 자석마커는 위치초기화를 위한 2개소구간에 1m 간격으로 11개가 설치되었고 그 외 구간은 4.5m간격으로 설치되어있다. 2개소의 정차구간, 1개소의 트램승강장, 12m 반경회전부 2개소가 존재한다.
도로의 자석마커는 설계된 자석극성 배치에 따라 각 지점에 설치된다. 도로에 설치된 자석마커의 각 절대위치좌표는 정밀한 계측장비(±5mm)를 사용하여 데이터베이스화 되어야 한다.
6. 바이모달트램 자동주행제어
차량자동주행은 차량이 자기위치를 인식한 이후부터 가능하다. 그러기 위해서 차량은 초기 수동운전으로 자석마커의 초기화 지점을 지나쳐야한다. 차량이 초기화 지점을 지나치고 자동운전시스템이 차량초기위치확인이 끝나면 자동운전 모니터 창에 자동운전가능 메시지(Auto Possible)가 현시된다. 이 상태에서 운전자가 자동운전버튼을 누르면 자동운전시스템은 자동운전을 시작한다. 이때부터 차량은 자동속도제어, 자동주행위치제어, 자동정위치 정밀정차를 수행한다.
6.1 자동속도제어
자동운전시스템은 차량의 주행위치에 따른 제한속도를 설계된 기준경로 파일로부터 참조하고 곡선부 및 정차 점을 고려하여 기준속도 프로파일을 생성하고 이에 따른 차량속도제어를 수행하기 위해 요구되는 구동토크 지령을 추진장치에 하달한다. 또한 속도의 감속을 위하여 제동부의 제동토크를 제어한다.
6.2 자동위치(조향) 제어
자동운전시스템은 정밀하게 설계된 기준 주행경로파일을 갖고 있다. 기준 주행경로파일은 차량이 지정된 노선에서 따라 가야할 이동 경로이다. 이 파일은 특정한 프로그램에 의해 설계되며 주행 도로 CAD 데이터를 기반으로 차량의 주행기준노선, 구간제한속도, 최대허용속도, 정차지점 등이 설정된다. 자동운전시스템의 계산된 차량의 실시간 위치와 기준경로의 2차원 평면 오차가“0”이 되도록 즉 차량상의 일정 기준점이 기준 경로상에 위치하도록 차량 바퀴의 조향각을 제어한다.
그림 7은 자동운전 차량이 12m 반지름 곡선주행부를 기준경로를 따라 주행하고 있다. 바이모달트램은 3축바퀴가 조향되는 1굴절차량이다. 그림 8은 자동운전상태에서 각 바퀴의 조향각 변동 상태를 보여준다.
6.3 자동정밀정차 제어
자동운전 모드에서 차량은 정거장에 도달하기 전 일정거리 전방에서 자동적으로 제동을 시작한다. 종방향정차지점에서 ±10cm내에 정차하며 승강장과 차량측면 간격은 10cm 간격을 기준으로 ±2cm를 유지하여 휠체어 및 승객의 승하차를 편리하고 안전하게 할 수 있다. 그림 9는 정거장 정차시 주행궤적이다.
값을 이용한다. 즉 주행 기준경로에서 우측 30cm 편차 방식으로 횡방향 이동(Crab
Way)한다. 정거장에서 차량의 각 축 바퀴가 같은 방향으로 평행 조향되어 이동함으로 짧은 정거장정차 거리를 이용할 수 있다. 그림 9는 정거장영역에서 기준주행로와 편차를 두어 자동정차한 차량의 주행궤적을 보여준다. 정거장 정차 후 출발하면 차량의 기준경로로 복귀하여 주행하게 된다.
그림 10은 차량 정거장 정밀정차 시연장면과 측면간격 측정 장면을 보여준다. 사진
의 검정라인은 차량과 정거장의 각 정차 기준선을 표시한다.
7. 결론
버스와 지하철이 갖는 장점을 갖는 바이모달트램이 개발되었고 여기에서 개발된 자동운전시스템기술은 산업계의 공장물류 및 항만자동물류 운송 자동화 및 PRT(Personal Rapid Transit) 등 자동운행을 요하는 차량시스템에 적용 및 응용될 수 있는 핵심기술로 국내자체 기술로 개발 시험되었다.
이 차량은 두 운송수단이 갖는 유리한 특징 중 버스의 접근성 및 운영의 유연성과 철도시스템이 갖는 정시성 및 효율성을 갖도록 할 수 있는 시스템으로 기존의 대형 운송시스템인 철도와 버스의 중간적인 역할을 수행하면서 보다 저렴한 비용으로 대중교통 시스템을 구축하여 대 국민서비스에 이용될 수 있을 것으로 기대한다.