

м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°ЁлҘј мң„н•ң мқём§Җкё°мҲ
нҺҳмқҙм§Җ м •ліҙ
кёҖ : мұ„мҳҒм„қ(webmaster@global-autonews.com)|
|
мҠ№мқё 2012-12-30 16:43:05 |



ліёл¬ё
1. м„ңлЎ
м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°ЁлһҖ м°Ёлҹү лӮҙ м„јм„ң л°Ҹ 엑추м—җмқҙн„°лҘј нҸ¬н•Ён•ҳлҠ” м „кё°вҲҷм „мһҗ мӢңмҠӨн…ңмқ„ мһҘм°©н•ҳм—¬ мўҖ лҚ” м§ҖлҠҘнҷ”лҗҳкі нҶөмӢ л°Ҹ көҗнҶө мҡҙмҳҒ мӢңмҠӨн…ңкіј к°ҷмқҖ мқён”„лқј(Infrastructure)мҷҖ нҳ‘м—…мқ„ нҶөн•ҳм—¬ м•Ҳм „м„ұ л°Ҹ мҡҙм „ нҡЁмңЁм„ұмқ„ к·№лҢҖнҷ”мӢңнӮӨлҠ” мҠӨл§ҲнҠё мһҗлҸҷм°ЁлҘј лң»н•ңлӢӨ. мқҙлҹ¬н•ң мҠӨл§ҲнҠё мһҗлҸҷм°ЁлҠ” нҒ¬кІҢ м°Ёлҹү мһҗмІҙлҘј мҠӨл§ҲнҠён•ҳкІҢ л§Ңл“ңлҠ” мҠӨл§ҲнҠё м•Ҳм „м°Ёлҹү кё°мҲ кіј м°Ёлҹү к°„ нҶөмӢ (V2V) л°Ҹ м°Ёлҹүкіј мқён”„лқј к°„ нҶөмӢ (V2I)мқ„ мқҙмҡ©н•ҳм—¬ мЈјліҖ м°Ёлҹүмқҳ мң„н—ҳ м •ліҙлҘј нҡҚл“қн•ЁмңјлЎңмҚЁ м•Ҳм „м„ұмқ„ м ңкі н• мҲҳ мһҲлҠ” кё°мҲ лЎң лӮҳлү мҲҳ мһҲлӢӨ.
кёҖ / мҶЎлҙүм„ӯ (м•„мЈјлҢҖн•ҷкөҗ)
м¶ңмІҳ / н•ңкөӯмһҗлҸҷм°Ёкіөн•ҷнҡҢ мҳӨнҶ м Җл„җ 2012л…„ 6мӣ”нҳё
нҳ„мһ¬ к°ңл°ңмқҙ 진н–үлҗҳкі мһҲкұ°лӮҳ мғҒмҡ©нҷ”к°Җ мҳҲмғҒлҗҳлҠ” мқём§Җ кё°мҲ мқҖ нҒ¬кІҢ кі м„ұлҠҘ м„јм„ңмқҳ к°ңл°ңкіј мқҙлҜё мғҒмҡ©нҷ”лҗң м„јм„ңлҘј мңөн•©н•ҙм„ң мқём§Җ м„ұлҠҘ л°Ҹ мӢ лў°лҸ„лҘј м ңкі н•ҳлҠ” кё°мҲ к°ңл°ңлЎң лӮҳлү мҲҳ мһҲлӢӨ. ліё кі м—җм„ңлҠ” мқјл°ҳм ҒмңјлЎң кі л Өлҗҳкі мһҲлҠ” м°Ёлҹү мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ лҝҗл§Ң м•„лӢҲлқј м°Ёлҹү лӮҙл¶Җмқҳ мҡҙм „мһҗ мғҒнғң мқём§Җ л°Ҹ м°Ёлҹү к°„ нҶөмӢ лҳҗлҠ” м°Ёлҹүкіј мқён”„лқј к°„ нҶөмӢ мқ„ мқҙмҡ©н•ң мқём§Җ лІ”мң„мқҳ нҷ•лҢҖм—җ кҙҖл Ёлҗң м—°кө¬лҸҷн–Ҙмқ„ мўҖ лҚ” мһҗм„ёнһҲ мӮҙнҺҙліҙкі мһҗ н•ңлӢӨ.
2. мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ
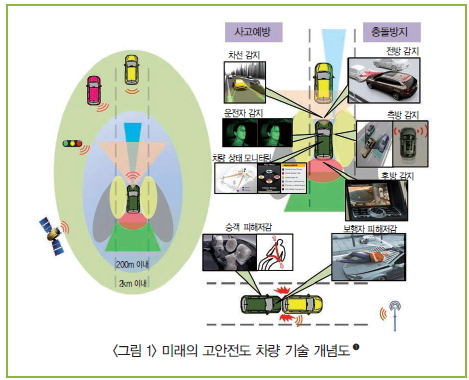
мөңк·ј л“Өм–ҙ мҡҙм „мһҗмқҳ м•Ҳм „м„ұкіј нҺёмқҳм„ұмқ„ м ңкі н•ҳкё° мң„н•ң кё°мҲ мқҙ нҷңл°ңнһҲ мғҒмҡ©нҷ”лҗҳкі мһҲлӢӨ. мҳҲлҘј л“Өм–ҙм„ң нҡЎл°©н–Ҙ м•Ҳм „ мӢңмҠӨн…ңмңјлЎң м°Ём„ мқҙнғҲ кІҪкі мӢңмҠӨн…ңмқҙлӮҳ м°Ём„ мң м§Җ мӢңмҠӨн…ң л“ұмқҙ мғҒмҡ©нҷ” лҗҳкі мһҲмңјл©° мў… л°©н–Ҙ м•Ҳм „мқ„ мң„н•ҳм—¬ м „л°© 추лҸҢ кІҪліҙ мӢңмҠӨн…ң, м „л°© 추лҸҢ кІҪк°җ мӢңмҠӨн…ң л“ұмқҙ лӢӨм–‘н•ң мқҙлҰ„мңјлЎң мғҒмҡ©нҷ” лҗҳкі мһҲлӢӨ. <к·ёлҰј 1>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҙ мҠӨл§ҲнҠё м•Ҳм „м°Ёлҹү кё°мҲ мқҖ м°Ёлҹү мһҗмІҙ лӮҙм—җ мһҘм°©лҗң м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ м „ л°©мң„м—җ мһҲлҠ” м°Ёлҹү л°Ҹ ліҙн–үмһҗ мқём§Җ лҝҗл§Ң м•„лӢҲлқј м°Ём„ л°Ҹ мҡҙм „мһҗмқҳ мғҒнғңлҘј лӘЁлӢҲн„°л§Ғ н•ҳм—¬ 추лҸҢ кІҪкі , м°Ём„ мқҙнғҲ кІҪкі , мЎёмқҢмҡҙм „ кІҪкі л“ұ мҡҙм „мһҗм—җкІҢ м•Ңл ӨмЈјлҠ” кІҪкі мӢңмҠӨн…ңл¶Җн„° мҠӨмҠӨлЎң 추лҸҢн”јн•ҙ м Җк°җ лҳҗлҠ” 추лҸҢнҡҢн”јлҘј мҲҳн–үн•ҳлҠ” мӢңмҠӨн…ңм—җ мқҙлҘҙкё°к№Ңм§Җ мҲҳлҸҷм Ғмқё л°©лІ•м—җм„ң лҠҘлҸҷм Ғмқё л°©лІ•мқҳ м•Ҳм „мӢңмҠӨн…ңмңјлЎң л°ңм „н•ҳкі мһҲлӢӨ.
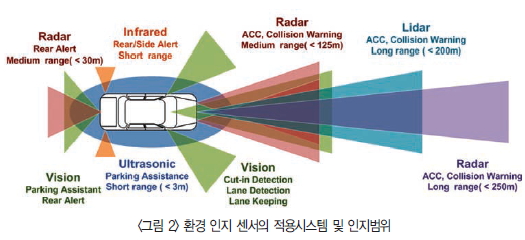
<к·ёлҰј 2>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҙ л ҲмқҙлҚ”(Radar), л№„м „, лқјмқҙлӢӨ(Lidar), мҙҲмқҢнҢҢ, м Ғмҷём„ м„јм„ңм—җ мқҙлҘҙлҠ” м„јм„ңл“Өмқҙ лӢӨм–‘н•ң мЎ°н•©мңјлЎң мһҘм°©лҗҳкі мһҲлӢӨ. лҳҗн•ң мқҙлҹ¬н•ң м„јм„ңл“ӨмқҖ мқём§Җм„ұлҠҘ л©ҙм—җм„ң к°Ғкё° мһҘлӢЁм җмқ„ к°Җм§Җкі мһҲмңјл©° <н‘ң 1>м—җ мқҙлҹ¬н•ң м„јм„ңл“Өмқҳ нҠ№м§•мқ„ мҡ”м•Ҫн•ҳмҳҖлӢӨ.
м°Ёлҹүмҡ© л ҲмқҙлҚ”мқҳ кІҪмҡ° 77GHz кё°л°ҳмһҘкұ°лҰ¬ л ҲмқҙлҚ”мҷҖ 24GHz кё°л°ҳ мӨ‘кұ°лҰ¬л ҲмқҙлҚ”лЎң к°ңл°ңмқҙ лҗҳкі мһҲмңјл©° мў… л°©н–Ҙм •нҷ•лҸ„к°Җ мҡ°мҲҳн•ҳкі лӮ м”ЁлӮҳ мЎ°лҸ„м—җмқҳ ліҖнҷ”м—җлҸ„ м„ұлҠҘліҖнҷ”к°Җ м ҒмқҖ нҠ№м„ұмқ„ к°Җм§Җкі мһҲм–ҙм„ң мһҗмңЁ мҲңн•ӯ(Adaptive Cruise Control) мӢңмҠӨн…ңмқҙлӮҳ м „л°© 추лҸҢ кІҪкі
(Forward Collision Warning) мӢңмҠӨн…ңм—җ мғҒмҡ©нҷ”лҗҳкі мһҲлӢӨ. л№„м „м„јм„ңмқҳ кІҪмҡ° м°Ём„ мқҙнғҲ кІҪкі (Lane Departure Warning), мӮ¬к°Ғм§ҖлҢҖ нғҗм§Җ(Blind Spot Detection), ліҙн–үмһҗ мқём§Җ мӢңмҠӨн…ңкіј к°ҷмқҙ мЈјлЎң кІҪкі мӢңмҠӨн…ңм—җ м Ғмҡ©лҗҳкі мһҲмңјл©° лӮ м”ЁлӮҳ мЎ°лҸ„м—җ л”°лқј м„ұлҠҘліҖнҷ”к°Җ мӢ¬н•ҙм„ң л№„м „м„јм„ңл§Ңмқ„ кё°л°ҳмңјлЎң м°Ёлҹүмқ„ м ңм–ҙн•ҳлҠ” мӢңмҠӨн…ңмқҖ м•„м§Ғ м Ғмҡ©лҗҳм§Җ лӘ»н•ҳкі мһҲлӢӨ. лҳҗн•ң мЈјм°Ё ліҙмЎ° мӢңмҠӨн…ң(Parking Assist System)мҡ© к·јкұ°лҰ¬ мһҘм• л¬ј мқём§ҖлҘј мң„н•ҙм„ң мҙҲмқҢнҢҢ м„јм„ңк°Җ л„җлҰ¬ мӮ¬мҡ©лҗҳкі мһҲлӢӨ. к·ё мҷём—җ лқјмқҙлӢӨк°Җ л ҲмқҙлҚ” лҢҖмҡ©мңјлЎң м Ғмҷём„ м„јм„ңк°Җ мҙҲмқҢнҢҢ м„јм„ң лҢҖмҡ©н•ҳм—¬ мӮ¬мҡ©лҗҳлҠ” кІҪмҡ°лҸ„ мһҲлӢӨ.
мқҙл ҮкІҢ лӢӨм–‘н•ң м„јм„ңл“Өмқҙ м җм°Ё м„ұлҠҘмқҙ к°ңм„ лҗҳл©ҙм„ң мӢңмҠӨн…ңмқҳ м•Ҳм •м„ұ л°Ҹ мӢ лў°м„ұмқ„ м ңкі н•ҳлҠ” кІҪмҡ°лҸ„ мһҲм§Җл§Ң лӢӨмў… к°„мқҳ м„јм„ңлҘј мңөн•©н•ҳм—¬ кё°мЎҙ лӢЁмқј м„јм„ңл§Ңмқ„ мӮ¬мҡ©н–Ҳмқ„ л•Ң ліҙлӢӨ лҚ”мҡұ лҜёкІҖм§ҖлӮҳ мҳӨкІҖм§Җ л¬ём ңлҘј к·№ліөн•ҳлҠ” кё°мҲ л“Өмқҙ нҷңл°ңнһҲ к°ңл°ңлҗҳкі мһҲлӢӨ. мҳҲлҘј л“Өм–ҙм„ң л ҲмқҙлҚ”мқҳ кІҪмҡ° м„јм„ң мһҗмІҙ нҠ№м„ұмңјлЎң мқён•ҙ м „л°© лӢӨмӨ‘ м°Ёлҹүмқҙ к·јм ‘н•ҳм—¬ лҸҷмқјн•ң мҶҚлҸ„лЎң мЈјн–ү мӢң мқҙлҘј кө¬л¶„н•ҳм§Җ лӘ»н•ҳкұ°лӮҳ л ҲмқҙлҚ” мӢ нҳёмқҳ лӮңл°ҳмӮ¬лЎң мқён•ҳм—¬ м •м§Җлҗң м°Ёлҹүмқ„ мқёмӢқн•ҳ
м§Җ лӘ»н•ҳлҠ” л“ұ ліөмһЎн•ң мЈјн–ү нҷҳкІҪм—җм„ң м„ұлҠҘмқҙ л–Ём–ҙм§ҖлҠ” л¬ём ңм җмқ„ к°Җм§Җкі мһҲлӢӨфҖ•ң. мқҙлҘј н•ҙкІ°н•ҳкі мһҗ м „л°© л№„м „м„јм„ңмҷҖмқҳ мңөн•©мқ„ нҶөн•ҳм—¬ мқҙлҘј к°ңм„ н•ҳкі мһҗ н•ҳлҠ” м—°кө¬к°Җ нҷңл°ңнһҲ 진н–үлҗҳкі мһҲлӢӨ. л ҲмқҙлҚ”мҷҖ л№„м „ м„јм„ңлҘј мңөн•©н•ҳлҠ” л°©лІ•мқҖ м„јм„ңмқҳ м •ліҙк°Җ мңөн•©лҗҳлҠ” лӢЁкі„м—җ л”°лқј нҒ¬кІҢ High-level(лҳҗлҠ” Sensor-level), Low-level(лҳҗлҠ” Central-level), к·ёлҰ¬кі Hybrid-level м„јм„ңмңөн•©мңјлЎң лӮҳлҲ„м–ҙ진лӢӨ.
мІ« лІҲм§ёлЎң High-level м„јм„ңмңөн•©мқҖ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңк°Җ к°ңлі„м ҒмңјлЎң м„ н–ү м°Ёлҹү(Primary Vehicle)м—җ лҢҖн•ң м •ліҙлҘј м ңкіөн•ҳкі мқҙлҘј мңөн•©н•ҳм—¬ м„ұлҠҘмқ„ к°ңм„ н•ҳлҠ” л°©лІ•мңјлЎң кі„мӮ°лҹүмқҙ м ҒмқҖ мһҘм җмқҙ мһҲмңјлӮҳ к°ңлі„ м„јм„ңмқҳ мқём§Җм„ұлҠҘмқҙ м„јм„ңмңөн•© м•Ңкі лҰ¬мҰҳмқҳ м„ұлҠҘм—җ м§Ғм ‘м Ғмқё мҳҒн–Ҙмқ„ лҒјм№ҳлҠ” н•ңкі„лҘј к°Җм§Җкі мһҲлӢӨ. л‘җ лІҲм§ёлЎң Low-level м„јм„ңмңөн•©мқҖ к°Ғ м„јм„ңм—җм„ң м„ н–ү м°Ёлҹү м •ліҙлҘј 비лЎҜн•ҙм„ң лӘЁл“ мһҘм• л¬јмқҳ мқём§Җ м •ліҙлҘј м ңкіөн•ҳкі мқҙлҘј мңөн•©н•ҳм—¬ мЈјліҖ нҷҳкІҪмқ„ мқём§Җн•ҳлҠ” л°©лІ•мқ„ лң»н•ңлӢӨ. мқҙ кІҪмҡ° лӘЁл“ лҚ°мқҙн„°к°Җ мӨ‘м•ҷмқҳ н”„лЎңм„ём„ңлЎң м „лӢ¬лҗҳм–ҙм•ј н•ҳлҜҖлЎң л§ҺмқҖ нҶөмӢ лҹүмқҙ мҡ”кө¬лҗҳл©° к°Ғ м„јм„ңлі„ лҚ°мқҙн„°мқҳ лҸҷкё°нҷ” л°Ҹ м •л ¬мқ„ мң„н•ҳм—¬ кі„мӮ°лҹүмқҙ л§ҺмқҖ м•Ңкі лҰ¬мҰҳмқҙ мӮ¬мҡ©лҗңлӢӨ. л§Ҳм§Җл§үмңјлЎң Hybrid-level м„јм„ңмңөн•©мқҖ к°ҖмһҘ л§Һмқҙ мӮ¬мҡ©лҗҳлҠ” л°©лІ•мңјлЎң л ҲмқҙлҚ”мқҳ мёЎм • кІ°кіјлҘј мҳҒмғҒ лӮҙ кҙҖмӢ¬ мҳҒм—ӯмқ„ м„Өм •н•ҳлҠ”лҚ° мӮ¬мҡ©н•ҳкұ°лӮҳ л ҲмқҙлҚ”мқҳ мқём§Җ м •ліҙмҷҖ л№„м „мқҳ мқём§Җ м •ліҙлҘј 비көҗн•ҳм—¬ м„ н–үм°Ёлҹүмқ„ мўҖ лҚ” мӢ лў°лҸ„ лҶ’
кІҢ мқём§Җн•ҳлҠ” л°©лІ• л“ұм—җ мӮ¬мҡ©лҗҳкі мһҲлӢӨ.
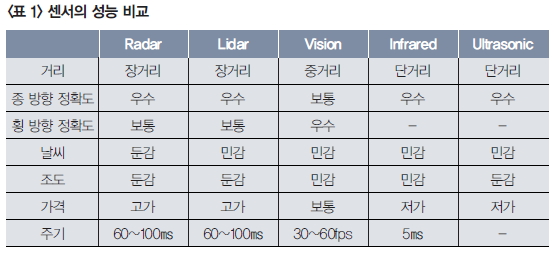
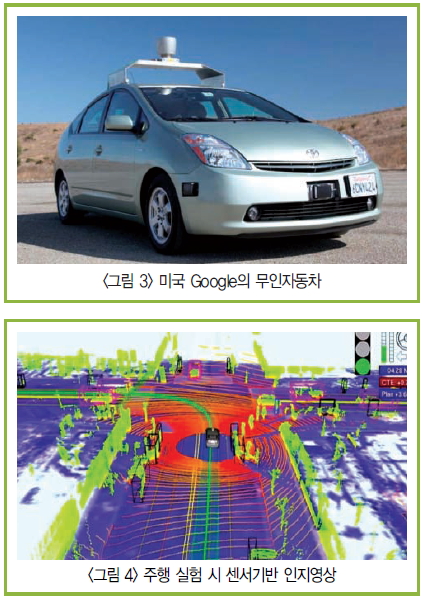
лӢӨмқҢмңјлЎң мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ мқҳ м „л§қмқ„ мң„н•ҙм„ң м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°Ёмқҳ к¶Ғк·№м Ғмқё лӘ©н‘ң мӨ‘м—җ н•ҳлӮҳмқё л¬ҙмқё мһҗмңЁ мЈјн–ү кҙҖл Ёлҗң м—°кө¬м—җм„ң мӮ¬мҡ©лҗҳкі мһҲлҠ” м„јм„ңлҘј мӮҙнҺҙлҙ„мңјлЎңмҚЁ лӮҳм•„к°Җм•ј н• л°©н–Ҙмқ„ мҳҲмёЎн• мҲҳ мһҲлӢӨ. н•ҙмҷёмқҳ кІҪмҡ° лҜёкөӯ DARPAм—җм„ң 2015л…„к№Ңм§Җ кө°мӮ¬мҡ© м°Ёлҹүмқҳ 1/3мқ„ л¬ҙмқёнҷ”н•ҳкё° мң„н•ң лӘ©н‘ңлҘј к°Җм§Җкі мһҘкұ°лҰ¬ л¬ҙмқё мһҗмңЁ мЈјн–үкіј лҸ„мӢ¬м—җм„ңмқҳ л¬ҙмқё мһҗмңЁ мЈјн–ү кё°мҲ мқ„ мң„н•ңвҖҳGrand ChallengeвҖҷмҷҖвҖҳUrban ChallengeвҖҷлқјлҠ” лҢҖнҡҢлҘј 2005л…„кіј 2007л…„м—җ к°Ғк°Ғ к°ңмөңн•ҳмҳҖлӢӨ. көӯл°©мҡ©мңјлЎң мӮ¬мҡ©лҗҳлҠ” м„јм„ңл“Өмқ„ мӮ¬мҡ©н•ҳм—¬ л¬ҙмқё мһҗмңЁ мЈјн–ү кё°мҲ мқҳ мӢӨнҳ„ к°ҖлҠҘм„ұмқ„ ліҙм—¬мЈјм—ҲлӢӨ. мқҙнӣ„ 2010л…„ лҜёкөӯ Googleм—җм„ң <к·ёлҰј 3>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҖ л¬ҙмқё мһҗмңЁ мЈјн–ү мһҗлҸҷм°ЁлҘј мҶҢк°ңн•ҳмҳҖлӢӨ. м°Ёлҹүм—җлҠ” мғҒлӢЁм—җ Velodyneмқҳ 360лҸ„лҘј мҠӨмә”н•ҳм—¬ 3-D м§ҖлҸ„лҘј мғқм„ұн• мҲҳ мһҲлҠ” л ҲмқҙлҚ”к°Җ мһҘм°©лҗҳм–ҙ мһҲлӢӨ<к·ёлҰј 4>. мқҙ мһҗлҸҷм°Ёмқҳ мӢ лў°лҸ„лҘј кІҖмҰқн•ҳкё° мң„н•ҳм—¬ мӢӨн—ҳмЈјн–үмңјлЎң 1,600km мқҙмғҒмқ„ л¬ҙмқёмңјлЎң мЈјн–үн•ҳмҳҖмңјл©° мқҙнӣ„ 22л§Ң 5мІңkm мқҙмғҒмқ„ л¬ҙмқёмңјлЎң мЈјн–үн–ҲлӢӨкі ліҙкі н•ҳкі мһҲлӢӨ. лҚ” лӮҳм•„к°Җ мқҙлҹ¬н•ң м°Ёлҹүмқҙ н•©лІ•м ҒмңјлЎң мЈјн–үн• мҲҳ мһҲлҠ” лІ•лҘ мқҙ лҜёкөӯ л„Өл°”лӢӨ мЈјм—җм„ңлҠ” 2011л…„лҸ„ 6мӣ”м—җ нҶөкіјлҗҳм—ҲлӢӨ.
л§ҺмқҖ мһҗлҸҷм°Ё нҡҢмӮ¬л“ӨлҸ„ м ңн•ңлҗң көҗнҶө нҷҳкІҪм—җм„ң мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң мӢңмҠӨн…ңмқ„ мқҙлҜё к°ңл°ңн•ҳкі н…ҢмҠӨнҠёлҘј 진н–үн•ҳкі мһҲлӢӨ. лҢҖн‘ңм ҒмңјлЎң BMW, Audi, Volkswagen л“ұмқҙ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ л¬ҙмқё мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң м°Ёлҹүмқ„ м„ ліҙмҳҖмңјл©°, 2011л…„м—җлҠ” Mercedes-Benzм—җм„ң 2013л…„ S-classм°Ёлҹүм—җ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ көҗнҶөмІҙмҰқмқҙ м–ҙлҠҗ м •лҸ„ мһҲлҠ” мғҒнҷ©м—җм„ң м°Ём„ мқ„ л”°лқј л¬ҙмқё мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң кё°лҠҘмқ„ 추к°Җн•ҳкІ лӢӨкі л°ңн‘ңн•ҳмҳҖлӢӨ.
3. нҶөмӢ кё°л°ҳ мқём§Җ кё°мҲ
2009л…„лҸ„ 12мӣ”м—җ л°ңн‘ңн•ң лҜёкөӯ көҗнҶөкөӯ ITS(Intelligent Transportation Systems) Strategic Research Plan (2010~2014л…„)м—җ мқҳн•ҳл©ҙ м—°кө¬ к°ңл°ң м „лһөмқ„ нҒ¬кІҢ м°Ёлҹү, мқён”„лқј, к·ёлҰ¬кі ліҙн–үмһҗмқҳ ITкё°кё°лҘј м—°кІ°н•ҳм—¬ м•Ҳм „м„ұ, мқҙлҸҷм„ұ, к·ёлҰ¬кі м№ңнҷҳкІҪм„ұмқҳ нҡЁмңЁмқ„ мөңлҢҖнҷ” н•ҳкё° мң„н•ң кё°мҲ лЎң мҡ”м•Ҫн• мҲҳ мһҲлӢӨ. мқҙ мӨ‘ м•Ҳм „м„ұм—җ кҙҖл Ёлҗң кё°мҲ мқҖ мқҙлҜё мқҙм „л¶Җн„° Cooperative Intersection Collision Avoidance System(CICAS)лӮҳ IntelliDriveмҷҖ
к°ҷмқҖ н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ к¶Ғк·№м Ғмқё лӘ©н‘ңлҘј мқҙлЈЁкё° мң„н•ҙ 진н–үлҗҳкі мһҲлӢӨ.
мқјліёмқҳ кІҪмҡ° Smartway 21 н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ м•Ҳм „н•ҳкі нҺём•Ҳн•ң лҸ„лЎң мҡҙн–ү мӢңмҠӨн…ң к°ңл°ңмқ„ лӘ©н‘ңлЎң 3лӢЁкі„(2000~2015л…„)лҘј 진н–үн•ҳкі мһҲмңјл©° мң лҹҪмқҳ кІҪмҡ° i2020 Intelligent Car Initiative м•„лһҳ м—¬лҹ¬ лҢҖнҳ• н”„лЎңм қнҠём—җ м—°кө¬к°ңл°ң нҲ¬мһҗлҘј н•ҳкі мһҲлӢӨфҖ•Ј-фҖ•Ө. мҳҲлҘј л“Өм–ҙ PReVENT, CVIS, SAFESPOT л“ұ лӢӨм–‘н•ң н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ м°Ёлҹүкіј мқён”„лқјлҘј м—°кі„н•ң мІЁлӢЁ мЈјн–үнҷҳкІҪмқ„ к°ңл°ңн•ҳкі мһҲлӢӨ.
мҡ°лҰ¬лӮҳлқјмқҳ кІҪмҡ° 2007л…„л¶Җн„° мҠӨл§ҲнҠё н•ҳмқҙмӣЁмқҙмӮ¬м—…мқҙлқјлҠ” мқҙлҰ„мңјлЎң IT, мһҗлҸҷм°Ё, к·ёлҰ¬кі лҸ„лЎң кё°мҲ мқ„ мңөвҲҷліөн•©н•ҳм—¬ мӢӨмӢңк°„мңјлЎң м •ліҙлҘј кіөмң н•ҳкі м „мІңнӣ„, мЈјм•јк°„ м•Ҳм „мЈјн–ү м§Җмӣҗкё°мҲ кө¬нҳ„мқ„ лӘ©н‘ңлЎң лҜёлһҳмқҳ м§ҖлҠҘнҳ• кі мҶҚлҸ„лЎң к°ңл°ң м—°кө¬лҘј 진н–үн•ҳкі мһҲлӢӨ.
м°Ёлҹү к°„(V2V) лҳҗлҠ” м°Ёлҹүкіј мқён”„лқј к°„(V2I) нҶөмӢ мқ„ мқҙмҡ©н•ң м•Ҳм „м„ұ м ңкі л°©лІ•мңјлЎңлҠ” мЈјліҖ лҸҢл°ң мң„н—ҳ мғҒнҷ© лҳҗлҠ” кё°мғҒм •ліҙлҘј мҡҙм „мһҗм—җкІҢ м „лӢ¬н•ҙ мЈјкұ°лӮҳ, мҡҙм „мһҗк°Җ нҠ№нһҲ л…ём•Ҫмһҗмқҳ кІҪмҡ° көҗм°ЁлЎң лӮҳ 비ліҙнҳё мўҢнҡҢм „ м§Җм—ӯмқ„ нҸ¬н•Ён•ҙм„ң мӮ¬кі лӢӨл°ң м§Җм—ӯм—җм„ң мўҖ лҚ” м•Ҳм „м ҒмңјлЎң мҡҙм „мқ„ мң лҸ„н•ҙ мЈјлҠ” л°©лІ• л“ұмқҙ мһҲлӢӨ.
лҜёкөӯ, мң лҹҪ, мқјліёмқҖ 2000л…„лҢҖ мҙҲвҲҷмӨ‘л°ҳл¶Җн„° м—°кө¬лҘј 진н–үн•ҙмҷ”мңјл©° мҳҲлҘј л“Өм–ҙ лҜёкөӯмқҳ кІҪмҡ° 2003л…„м—җ VII(Vehicle Infrastructure Integration)лқјлҠ” н”„лЎңм қнҠёлҘј мӢңмһ‘н•ҳм—¬ DSRC(Dedicated Short-Range Communications) кё°л°ҳ V2VмҷҖ V2I нҶөмӢ мқ„ к°ңл°ңн•ҳмҳҖмңјл©° 2009л…„м—җ IntelliDriveлқјлҠ” н”„лЎңм қнҠё лӘ…мңјлЎң м „нҷҳмқҙ лҗҳм—ҲлӢӨ.
лҜёкөӯ IntelliDrive н”„лЎңм қнҠёмқҳ кІҪмҡ° V2VмҷҖ V2I нҶөмӢ мқ„ мң„н•ҳм—¬ 5.9GHz лҢҖм—ӯмқҳ WAVE (Wireless Accessin Vehicular Environments) нҶөмӢ кё°мҲ мқҙ мЈјлЎң мӮ¬мҡ©лҗҳм—Ҳмңјл©° 2013л…„ мғҒмҡ©нҷ”к°Җ мҳҲмғҒлҗңлӢӨ. мң лҹҪлҸ„ WAVE нҶөмӢ мӢңм ңн’Ҳмқ„ мӢңлІ”мӮ¬м—…м—җ м Ғмҡ© л°Ҹ кё°мҲ кІҖмҰқ л“ұмқ„ нҶөн•ҳм—¬ мғҒмҡ©нҷ”м—җ лҢҖ비н•ҳкі мһҲлӢӨ.
4. мҡҙм „мһҗ мқём§Җ кё°мҲ
л№„м „м„јм„ңлҘј кё°л°ҳмңјлЎң мҡҙм „мһҗмқҳ лҲҲкәјн’Җмқ„ мқём§Җн•ҳм—¬ мЎёмқҢмқ„ к°җм§Җн•ҳм—¬ кІҪкі лҘј мЈјлҠ” мӢңмҠӨн…ң к°ңл°ңмқҖ мҳҲм „л¶Җн„° 진н–үмқҙ лҗҳм–ҙ мҷ”мңјл©° Fordмқҳ Driver Alert, Mercedes-Benzмқҳ Attention Assist, Volkswagenмқҳ Fatigue Detection System, Volvoмқҳ Driver Alert Controlм—җ мқҙлҘҙкё°к№Ңм§Җ лӢӨм–‘н•ң мқҙлҰ„мңјлЎң мғҒмҡ©нҷ”к°Җ лҗҳм–ҙ мҷ”лӢӨ.
2010л…„м—җ мғҲлЎӯкІҢ к°ңл°ңлҗң Mercedes-Benzмқҳ Attention AssistлҠ” мҡҙм „мһҗмқҳ н–үлҸҷмқ„ к°җмӢңн•ҳлҠ” мҲҳмӢӯ к°ңмқҳ м„јм„ңмҷҖ нҸүмҶҢмқҳ мҡҙм „мҠөкҙҖмқ„ кё°м–өн•ҳкё° мң„н•ң м ҖмһҘмһҘм№ҳлЎң мқҙлЈЁм–ҙм ё мһҲлӢӨ. мҡҙм „мһҗк°Җ мӢңлҸҷмқ„ кұёкі м¶ңл°ңн•ҳл©ҙ мІҳмқҢ 20м—¬ 분간мқҳ мЈјн–ү нҢЁн„ҙмқ„ кё°лЎқн•ңлӢӨ. мҰү лҸ„лЎң мғҒнҷ©м—җ л§һкІҢ мҠӨнӢ°м–ҙл§Ғ нң мқ„ мӣҖм§Ғмқҙкұ°лӮҳ м—‘м…Җкіј лёҢл ҲмқҙнҒ¬ нҺҳлӢ¬мқ„ мЎ°мһ‘н•ҳлҠ”м§ҖлҘј к°җмӢңн•ҳлӢӨк°Җ нҸүмҶҢмҷҖ лӢӨлҘё н–үлҸҷмқ„ ліҙмқҙл©ҙ мҡҙм „мһҗк°Җ мЎёмқҢмҡҙм „мқ„ н•ҳлҠ” кІғмңјлЎң мқёмӢқн•ңлӢӨ. мЎёмқҢмқҙ л°Җл ӨмҳӨкё° мү¬мҡҙ кі мҶҚлҸ„лЎңлҘј лӢ¬лҰ¬кұ°лӮҳ м•јк°„м—җ мҡҙм „м„қм—җ мҳӨлҘё кІҪмҡ° мӢңмҠӨн…ңмқҙ лҚ”мҡұ лҜјк°җн•ҙм§Җл©° л§Ңм•Ҫ мҡҙм „мһҗк°Җ мЎёмқҢмҡҙм „мқ„ н•ңлӢӨкі нҢҗлӢЁлҗҳл©ҙ мҡҙм „мһҗм—җкІҢ кІҪкі лҘј мӨҖлӢӨ.
мң„м—җм„ң мҶҢк°ңлҗң мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғ мӢңмҠӨн…ңмқҖ к·ё мһҗмІҙлЎң лҠҘлҸҷнҳ• м•Ҳм „ мӢңмҠӨн…ңм—җ м Ғмҡ©лҗ мҲҳ мһҲлҠ” мӨ‘мҡ”кё°мҲ мқҙм§Җл§Ң н–Ҙнӣ„ мқ‘мҡ©лІ”мң„к°Җ лҚ”мҡұ нҷ•лҢҖлҗ кІғмңјлЎң м „л§қмқҙ лҗҳкі мһҲлӢӨ. нҠ№нһҲ лӢЁмҲң н…”л Ҳл§ӨнӢұмҠӨ мҲҳмӨҖмқ„ лІ—м–ҙлӮҳ мқёнҸ¬н…ҢмқёлЁјнҠёмқҳ нҷ•лҢҖ л°Ҹ нҒҙлқјмҡ°л“ңмқҳ кІ°н•©к№Ңм§Җ, ITвҲҷл°ҳлҸ„мІҙ кё°мҲ кіј мңөн•©н•ңвҖҳм»Өл„ҘнӢ°л“ң(Connected) м№ҙвҖҷлҠ” мһҗлҸҷм°Ё м—…кі„ лҜёлһҳмғҒмңјлЎңлҸ„ мҳҲмғҒлҗҳкі мһҲлӢӨ. мқҙлҹ¬н•ң м»Өл„ҘнӢ°л“ң м№ҙ мӢңмһҘмқ„ м„ м җн•ҳкё° мң„н•ҙ мһҗлҸҷм°Ё м—…мІҙлҘј мӨ‘мӢ¬мңјлЎң к°Ғ 분야별 мЈјмҡ” кё°м—…л“Өк°„ н•©мў…м—°нҡЎлҸ„ нҷңл°ңн•ҳлӢӨ. мҳҲлҘј л“Өл©ҙ м°Ёлҹү лӮҙ м•ұмҠӨнҶ м–ҙ м„ң비мҠӨ(BMW), кө¬кёҖл§өмқ„ нҷңмҡ©н•ң лӮҙ비кІҢмқҙм…ҳ(Audi), мҠӨл§ҲнҠёнҸ° м•ұмқ„ нҷңмҡ©н•ң нҠёмң„н„° л©”мӢңм§Җмқҳ м°Ёлҹү лӮҙ нҷ•мқё(Ford), мқҢм„ұ мқёмӢқмқ„ нҶөн•ң нҺҳмқҙмҠӨл¶Ғмқҳ мғҒнғң м •ліҙ м—…лҚ°мқҙнҠё, LTEл§қмқ„ мқҙмҡ©н•ҳлҠ” н…”л Ҳл§ӨнӢұмҠӨ(GM) л“ұмқҙ мһҲмңјл©° мқҙлҹ¬н•ң кё°мҲ мқҳ мһҮлӢЁ м¶ңнҳ„мқҖ м»Өл„ҘнӢ°л“ң м№ҙмқҳ мғҒмҡ©нҷ”к°Җ к°ҖмҶҚнҷ”лҗҳкі мһҲмқҢмқ„ м—¬мӢӨнһҲ ліҙм—¬мӨҖлӢӨ.
н•ҳм§Җл§Ң м»Өл„ҘнӢ°л“ң м№ҙм—җ кҙҖл Ёлҗң кё°мҲ мқҖ мҡҙм „мһҗмқҳ 집мӨ‘лҸ„лҘј нҳ„м ҖнһҲ м Җн•ҳмӢңнӮ¬ мҲҳ мһҲмңјл©° мЎёмқҢмқҙлӮҳ мқҢмЈјмҡҙм „ лӘ»м§Җм•ҠкІҢ мӮ¬кі мң л°ңм—җ м№ҳлӘ…м Ғмқё мӣҗмқё лҗ мҲҳ мһҲмқҢмқ„ лҲ„кө¬лҸ„ л¶Җмқён• мҲҳ м—ҶлӢӨ. л”°лқјм„ң м»Өл„ҘнӢ°л“ң м№ҙмқҳ мғҒмҡ©нҷ”лҘј к°ҖмҶҚнҷ”н•ҳкё° мң„м—җм„ң м–ёкёүлҗң мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғ кё°мҲ мқҳ нҷ•лҢҖ м Ғмҡ©мқҙ л¶Ҳк°Җн”јн•ҙ ліҙмқёлӢӨ.
5. кІ°лЎ
кё°мЎҙмқҳ м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°Ё кё°мҲ мқҙ нҶөмӢ л°Ҹ ITкё°мҲ мқҙ м ‘лӘ©лҗҳм–ҙ мЈјліҖ м°Ёлҹүкіјмқҳ м•Ҳм „м„ұ нҷ•ліҙм—җм„ң мўҖ лҚ” лІ”мң„к°Җ нҷ•мһҘлҗҳкі мһҲмңјл©° м°Ёлҹү лӮҙл¶Җмқҳ мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғмқ„ нҶөн•ҳм—¬ мҡҙм „мһҗ м№ңнҷ”нҳ• м•Ҳм „ мӢңмҠӨн…ңмңјлЎң 진нҷ”н•ҳкі мһҲлӢӨ. мқҙлҹ¬н•ң мӢңмҠӨн…ңмқ„ к°ңл°ңн•ҳкі мғҒмҡ©нҷ”н•ҳкё° мң„н•ҙм„ңлҠ” мқём§ҖлҘј мң„н•ң м„јм„ң к°ңл°ңкіј мӢ нҳёмІҳлҰ¬, к·ёлҰ¬кі м„јм„ңмңөн•©кё°мҲ мқҙ м„ н–үлҗҳм–ҙм•ј н•ңлӢӨ. лҳҗн•ң кіјкұ° м°Ёлҹүкё°л°ҳ м•Ҳм „ кё°мҲ к°ңл°ң нҢЁлҹ¬лӢӨмһ„м—җм„ң мҠӨл§ҲнҠёнҸ°мқ„ 비лЎҜн•ң л¬ҙм„ мқён„°л„· кё°мҲ л°Ҹ IT кё°мҲ мқҳ кёүм„ұмһҘм—җ л°ңл§һ추м–ҙ мўҖ лҚ” мӢңмһҘм„ұмқҙ мһҲкі мғҒмҡ©нҷ” к°ҖлҠҘм„ұмқҙ нҒ° кё°мҲ к°ңл°ңлЎң м „нҷҳлҗҳкі мһҲлҠ” мӢңм җмқҙл©° мқҙлҘј мң„н•ң мҡҙм „мһҗ м№ңнҷ”нҳ• м•Ҳм „ кё°мҲ к°ңл°ңмқҙ мӢңкёүн•ҳл©° нҠ№нһҲ мҡҙм „мһҗмқҳ нҠ№м„ұмқ„ кі л Өн•ҳлҠ” м°Ём„ёлҢҖ м•Ҳм „ мӢңмҠӨн…ң к°ңл°ңмқ„ мң„н•ң мқём§Җ кё°мҲ мқҳ мӨ‘мҡ”м„ұмқ„ к°•мЎ°н•ҳкі мһҗ н•ңлӢӨ.
м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°ЁлһҖ м°Ёлҹү лӮҙ м„јм„ң л°Ҹ 엑추м—җмқҙн„°лҘј нҸ¬н•Ён•ҳлҠ” м „кё°вҲҷм „мһҗ мӢңмҠӨн…ңмқ„ мһҘм°©н•ҳм—¬ мўҖ лҚ” м§ҖлҠҘнҷ”лҗҳкі нҶөмӢ л°Ҹ көҗнҶө мҡҙмҳҒ мӢңмҠӨн…ңкіј к°ҷмқҖ мқён”„лқј(Infrastructure)мҷҖ нҳ‘м—…мқ„ нҶөн•ҳм—¬ м•Ҳм „м„ұ л°Ҹ мҡҙм „ нҡЁмңЁм„ұмқ„ к·№лҢҖнҷ”мӢңнӮӨлҠ” мҠӨл§ҲнҠё мһҗлҸҷм°ЁлҘј лң»н•ңлӢӨ. мқҙлҹ¬н•ң мҠӨл§ҲнҠё мһҗлҸҷм°ЁлҠ” нҒ¬кІҢ м°Ёлҹү мһҗмІҙлҘј мҠӨл§ҲнҠён•ҳкІҢ л§Ңл“ңлҠ” мҠӨл§ҲнҠё м•Ҳм „м°Ёлҹү кё°мҲ кіј м°Ёлҹү к°„ нҶөмӢ (V2V) л°Ҹ м°Ёлҹүкіј мқён”„лқј к°„ нҶөмӢ (V2I)мқ„ мқҙмҡ©н•ҳм—¬ мЈјліҖ м°Ёлҹүмқҳ мң„н—ҳ м •ліҙлҘј нҡҚл“қн•ЁмңјлЎңмҚЁ м•Ҳм „м„ұмқ„ м ңкі н• мҲҳ мһҲлҠ” кё°мҲ лЎң лӮҳлү мҲҳ мһҲлӢӨ.
кёҖ / мҶЎлҙүм„ӯ (м•„мЈјлҢҖн•ҷкөҗ)
м¶ңмІҳ / н•ңкөӯмһҗлҸҷм°Ёкіөн•ҷнҡҢ мҳӨнҶ м Җл„җ 2012л…„ 6мӣ”нҳё
нҳ„мһ¬ к°ңл°ңмқҙ 진н–үлҗҳкі мһҲкұ°лӮҳ мғҒмҡ©нҷ”к°Җ мҳҲмғҒлҗҳлҠ” мқём§Җ кё°мҲ мқҖ нҒ¬кІҢ кі м„ұлҠҘ м„јм„ңмқҳ к°ңл°ңкіј мқҙлҜё мғҒмҡ©нҷ”лҗң м„јм„ңлҘј мңөн•©н•ҙм„ң мқём§Җ м„ұлҠҘ л°Ҹ мӢ лў°лҸ„лҘј м ңкі н•ҳлҠ” кё°мҲ к°ңл°ңлЎң лӮҳлү мҲҳ мһҲлӢӨ. ліё кі м—җм„ңлҠ” мқјл°ҳм ҒмңјлЎң кі л Өлҗҳкі мһҲлҠ” м°Ёлҹү мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ лҝҗл§Ң м•„лӢҲлқј м°Ёлҹү лӮҙл¶Җмқҳ мҡҙм „мһҗ мғҒнғң мқём§Җ л°Ҹ м°Ёлҹү к°„ нҶөмӢ лҳҗлҠ” м°Ёлҹүкіј мқён”„лқј к°„ нҶөмӢ мқ„ мқҙмҡ©н•ң мқём§Җ лІ”мң„мқҳ нҷ•лҢҖм—җ кҙҖл Ёлҗң м—°кө¬лҸҷн–Ҙмқ„ мўҖ лҚ” мһҗм„ёнһҲ мӮҙнҺҙліҙкі мһҗ н•ңлӢӨ.
2. мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ
мөңк·ј л“Өм–ҙ мҡҙм „мһҗмқҳ м•Ҳм „м„ұкіј нҺёмқҳм„ұмқ„ м ңкі н•ҳкё° мң„н•ң кё°мҲ мқҙ нҷңл°ңнһҲ мғҒмҡ©нҷ”лҗҳкі мһҲлӢӨ. мҳҲлҘј л“Өм–ҙм„ң нҡЎл°©н–Ҙ м•Ҳм „ мӢңмҠӨн…ңмңјлЎң м°Ём„ мқҙнғҲ кІҪкі мӢңмҠӨн…ңмқҙлӮҳ м°Ём„ мң м§Җ мӢңмҠӨн…ң л“ұмқҙ мғҒмҡ©нҷ” лҗҳкі мһҲмңјл©° мў… л°©н–Ҙ м•Ҳм „мқ„ мң„н•ҳм—¬ м „л°© 추лҸҢ кІҪліҙ мӢңмҠӨн…ң, м „л°© 추лҸҢ кІҪк°җ мӢңмҠӨн…ң л“ұмқҙ лӢӨм–‘н•ң мқҙлҰ„мңјлЎң мғҒмҡ©нҷ” лҗҳкі мһҲлӢӨ. <к·ёлҰј 1>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҙ мҠӨл§ҲнҠё м•Ҳм „м°Ёлҹү кё°мҲ мқҖ м°Ёлҹү мһҗмІҙ лӮҙм—җ мһҘм°©лҗң м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ м „ л°©мң„м—җ мһҲлҠ” м°Ёлҹү л°Ҹ ліҙн–үмһҗ мқём§Җ лҝҗл§Ң м•„лӢҲлқј м°Ём„ л°Ҹ мҡҙм „мһҗмқҳ мғҒнғңлҘј лӘЁлӢҲн„°л§Ғ н•ҳм—¬ 추лҸҢ кІҪкі , м°Ём„ мқҙнғҲ кІҪкі , мЎёмқҢмҡҙм „ кІҪкі л“ұ мҡҙм „мһҗм—җкІҢ м•Ңл ӨмЈјлҠ” кІҪкі мӢңмҠӨн…ңл¶Җн„° мҠӨмҠӨлЎң 추лҸҢн”јн•ҙ м Җк°җ лҳҗлҠ” 추лҸҢнҡҢн”јлҘј мҲҳн–үн•ҳлҠ” мӢңмҠӨн…ңм—җ мқҙлҘҙкё°к№Ңм§Җ мҲҳлҸҷм Ғмқё л°©лІ•м—җм„ң лҠҘлҸҷм Ғмқё л°©лІ•мқҳ м•Ҳм „мӢңмҠӨн…ңмңјлЎң л°ңм „н•ҳкі мһҲлӢӨ.
<к·ёлҰј 2>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҙ л ҲмқҙлҚ”(Radar), л№„м „, лқјмқҙлӢӨ(Lidar), мҙҲмқҢнҢҢ, м Ғмҷём„ м„јм„ңм—җ мқҙлҘҙлҠ” м„јм„ңл“Өмқҙ лӢӨм–‘н•ң мЎ°н•©мңјлЎң мһҘм°©лҗҳкі мһҲлӢӨ. лҳҗн•ң мқҙлҹ¬н•ң м„јм„ңл“ӨмқҖ мқём§Җм„ұлҠҘ л©ҙм—җм„ң к°Ғкё° мһҘлӢЁм җмқ„ к°Җм§Җкі мһҲмңјл©° <н‘ң 1>м—җ мқҙлҹ¬н•ң м„јм„ңл“Өмқҳ нҠ№м§•мқ„ мҡ”м•Ҫн•ҳмҳҖлӢӨ.
м°Ёлҹүмҡ© л ҲмқҙлҚ”мқҳ кІҪмҡ° 77GHz кё°л°ҳмһҘкұ°лҰ¬ л ҲмқҙлҚ”мҷҖ 24GHz кё°л°ҳ мӨ‘кұ°лҰ¬л ҲмқҙлҚ”лЎң к°ңл°ңмқҙ лҗҳкі мһҲмңјл©° мў… л°©н–Ҙм •нҷ•лҸ„к°Җ мҡ°мҲҳн•ҳкі лӮ м”ЁлӮҳ мЎ°лҸ„м—җмқҳ ліҖнҷ”м—җлҸ„ м„ұлҠҘліҖнҷ”к°Җ м ҒмқҖ нҠ№м„ұмқ„ к°Җм§Җкі мһҲм–ҙм„ң мһҗмңЁ мҲңн•ӯ(Adaptive Cruise Control) мӢңмҠӨн…ңмқҙлӮҳ м „л°© 추лҸҢ кІҪкі
(Forward Collision Warning) мӢңмҠӨн…ңм—җ мғҒмҡ©нҷ”лҗҳкі мһҲлӢӨ. л№„м „м„јм„ңмқҳ кІҪмҡ° м°Ём„ мқҙнғҲ кІҪкі (Lane Departure Warning), мӮ¬к°Ғм§ҖлҢҖ нғҗм§Җ(Blind Spot Detection), ліҙн–үмһҗ мқём§Җ мӢңмҠӨн…ңкіј к°ҷмқҙ мЈјлЎң кІҪкі мӢңмҠӨн…ңм—җ м Ғмҡ©лҗҳкі мһҲмңјл©° лӮ м”ЁлӮҳ мЎ°лҸ„м—җ л”°лқј м„ұлҠҘліҖнҷ”к°Җ мӢ¬н•ҙм„ң л№„м „м„јм„ңл§Ңмқ„ кё°л°ҳмңјлЎң м°Ёлҹүмқ„ м ңм–ҙн•ҳлҠ” мӢңмҠӨн…ңмқҖ м•„м§Ғ м Ғмҡ©лҗҳм§Җ лӘ»н•ҳкі мһҲлӢӨ. лҳҗн•ң мЈјм°Ё ліҙмЎ° мӢңмҠӨн…ң(Parking Assist System)мҡ© к·јкұ°лҰ¬ мһҘм• л¬ј мқём§ҖлҘј мң„н•ҙм„ң мҙҲмқҢнҢҢ м„јм„ңк°Җ л„җлҰ¬ мӮ¬мҡ©лҗҳкі мһҲлӢӨ. к·ё мҷём—җ лқјмқҙлӢӨк°Җ л ҲмқҙлҚ” лҢҖмҡ©мңјлЎң м Ғмҷём„ м„јм„ңк°Җ мҙҲмқҢнҢҢ м„јм„ң лҢҖмҡ©н•ҳм—¬ мӮ¬мҡ©лҗҳлҠ” кІҪмҡ°лҸ„ мһҲлӢӨ.
мқҙл ҮкІҢ лӢӨм–‘н•ң м„јм„ңл“Өмқҙ м җм°Ё м„ұлҠҘмқҙ к°ңм„ лҗҳл©ҙм„ң мӢңмҠӨн…ңмқҳ м•Ҳм •м„ұ л°Ҹ мӢ лў°м„ұмқ„ м ңкі н•ҳлҠ” кІҪмҡ°лҸ„ мһҲм§Җл§Ң лӢӨмў… к°„мқҳ м„јм„ңлҘј мңөн•©н•ҳм—¬ кё°мЎҙ лӢЁмқј м„јм„ңл§Ңмқ„ мӮ¬мҡ©н–Ҳмқ„ л•Ң ліҙлӢӨ лҚ”мҡұ лҜёкІҖм§ҖлӮҳ мҳӨкІҖм§Җ л¬ём ңлҘј к·№ліөн•ҳлҠ” кё°мҲ л“Өмқҙ нҷңл°ңнһҲ к°ңл°ңлҗҳкі мһҲлӢӨ. мҳҲлҘј л“Өм–ҙм„ң л ҲмқҙлҚ”мқҳ кІҪмҡ° м„јм„ң мһҗмІҙ нҠ№м„ұмңјлЎң мқён•ҙ м „л°© лӢӨмӨ‘ м°Ёлҹүмқҙ к·јм ‘н•ҳм—¬ лҸҷмқјн•ң мҶҚлҸ„лЎң мЈјн–ү мӢң мқҙлҘј кө¬л¶„н•ҳм§Җ лӘ»н•ҳкұ°лӮҳ л ҲмқҙлҚ” мӢ нҳёмқҳ лӮңл°ҳмӮ¬лЎң мқён•ҳм—¬ м •м§Җлҗң м°Ёлҹүмқ„ мқёмӢқн•ҳ
м§Җ лӘ»н•ҳлҠ” л“ұ ліөмһЎн•ң мЈјн–ү нҷҳкІҪм—җм„ң м„ұлҠҘмқҙ л–Ём–ҙм§ҖлҠ” л¬ём ңм җмқ„ к°Җм§Җкі мһҲлӢӨфҖ•ң. мқҙлҘј н•ҙкІ°н•ҳкі мһҗ м „л°© л№„м „м„јм„ңмҷҖмқҳ мңөн•©мқ„ нҶөн•ҳм—¬ мқҙлҘј к°ңм„ н•ҳкі мһҗ н•ҳлҠ” м—°кө¬к°Җ нҷңл°ңнһҲ 진н–үлҗҳкі мһҲлӢӨ. л ҲмқҙлҚ”мҷҖ л№„м „ м„јм„ңлҘј мңөн•©н•ҳлҠ” л°©лІ•мқҖ м„јм„ңмқҳ м •ліҙк°Җ мңөн•©лҗҳлҠ” лӢЁкі„м—җ л”°лқј нҒ¬кІҢ High-level(лҳҗлҠ” Sensor-level), Low-level(лҳҗлҠ” Central-level), к·ёлҰ¬кі Hybrid-level м„јм„ңмңөн•©мңјлЎң лӮҳлҲ„м–ҙ진лӢӨ.
мІ« лІҲм§ёлЎң High-level м„јм„ңмңөн•©мқҖ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңк°Җ к°ңлі„м ҒмңјлЎң м„ н–ү м°Ёлҹү(Primary Vehicle)м—җ лҢҖн•ң м •ліҙлҘј м ңкіөн•ҳкі мқҙлҘј мңөн•©н•ҳм—¬ м„ұлҠҘмқ„ к°ңм„ н•ҳлҠ” л°©лІ•мңјлЎң кі„мӮ°лҹүмқҙ м ҒмқҖ мһҘм җмқҙ мһҲмңјлӮҳ к°ңлі„ м„јм„ңмқҳ мқём§Җм„ұлҠҘмқҙ м„јм„ңмңөн•© м•Ңкі лҰ¬мҰҳмқҳ м„ұлҠҘм—җ м§Ғм ‘м Ғмқё мҳҒн–Ҙмқ„ лҒјм№ҳлҠ” н•ңкі„лҘј к°Җм§Җкі мһҲлӢӨ. л‘җ лІҲм§ёлЎң Low-level м„јм„ңмңөн•©мқҖ к°Ғ м„јм„ңм—җм„ң м„ н–ү м°Ёлҹү м •ліҙлҘј 비лЎҜн•ҙм„ң лӘЁл“ мһҘм• л¬јмқҳ мқём§Җ м •ліҙлҘј м ңкіөн•ҳкі мқҙлҘј мңөн•©н•ҳм—¬ мЈјліҖ нҷҳкІҪмқ„ мқём§Җн•ҳлҠ” л°©лІ•мқ„ лң»н•ңлӢӨ. мқҙ кІҪмҡ° лӘЁл“ лҚ°мқҙн„°к°Җ мӨ‘м•ҷмқҳ н”„лЎңм„ём„ңлЎң м „лӢ¬лҗҳм–ҙм•ј н•ҳлҜҖлЎң л§ҺмқҖ нҶөмӢ лҹүмқҙ мҡ”кө¬лҗҳл©° к°Ғ м„јм„ңлі„ лҚ°мқҙн„°мқҳ лҸҷкё°нҷ” л°Ҹ м •л ¬мқ„ мң„н•ҳм—¬ кі„мӮ°лҹүмқҙ л§ҺмқҖ м•Ңкі лҰ¬мҰҳмқҙ мӮ¬мҡ©лҗңлӢӨ. л§Ҳм§Җл§үмңјлЎң Hybrid-level м„јм„ңмңөн•©мқҖ к°ҖмһҘ л§Һмқҙ мӮ¬мҡ©лҗҳлҠ” л°©лІ•мңјлЎң л ҲмқҙлҚ”мқҳ мёЎм • кІ°кіјлҘј мҳҒмғҒ лӮҙ кҙҖмӢ¬ мҳҒм—ӯмқ„ м„Өм •н•ҳлҠ”лҚ° мӮ¬мҡ©н•ҳкұ°лӮҳ л ҲмқҙлҚ”мқҳ мқём§Җ м •ліҙмҷҖ л№„м „мқҳ мқём§Җ м •ліҙлҘј 비көҗн•ҳм—¬ м„ н–үм°Ёлҹүмқ„ мўҖ лҚ” мӢ лў°лҸ„ лҶ’
кІҢ мқём§Җн•ҳлҠ” л°©лІ• л“ұм—җ мӮ¬мҡ©лҗҳкі мһҲлӢӨ.
лӢӨмқҢмңјлЎң мЈјліҖ нҷҳкІҪ мқём§Җ кё°мҲ мқҳ м „л§қмқ„ мң„н•ҙм„ң м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°Ёмқҳ к¶Ғк·№м Ғмқё лӘ©н‘ң мӨ‘м—җ н•ҳлӮҳмқё л¬ҙмқё мһҗмңЁ мЈјн–ү кҙҖл Ёлҗң м—°кө¬м—җм„ң мӮ¬мҡ©лҗҳкі мһҲлҠ” м„јм„ңлҘј мӮҙнҺҙлҙ„мңјлЎңмҚЁ лӮҳм•„к°Җм•ј н• л°©н–Ҙмқ„ мҳҲмёЎн• мҲҳ мһҲлӢӨ. н•ҙмҷёмқҳ кІҪмҡ° лҜёкөӯ DARPAм—җм„ң 2015л…„к№Ңм§Җ кө°мӮ¬мҡ© м°Ёлҹүмқҳ 1/3мқ„ л¬ҙмқёнҷ”н•ҳкё° мң„н•ң лӘ©н‘ңлҘј к°Җм§Җкі мһҘкұ°лҰ¬ л¬ҙмқё мһҗмңЁ мЈјн–үкіј лҸ„мӢ¬м—җм„ңмқҳ л¬ҙмқё мһҗмңЁ мЈјн–ү кё°мҲ мқ„ мң„н•ңвҖҳGrand ChallengeвҖҷмҷҖвҖҳUrban ChallengeвҖҷлқјлҠ” лҢҖнҡҢлҘј 2005л…„кіј 2007л…„м—җ к°Ғк°Ғ к°ңмөңн•ҳмҳҖлӢӨ. көӯл°©мҡ©мңјлЎң мӮ¬мҡ©лҗҳлҠ” м„јм„ңл“Өмқ„ мӮ¬мҡ©н•ҳм—¬ л¬ҙмқё мһҗмңЁ мЈјн–ү кё°мҲ мқҳ мӢӨнҳ„ к°ҖлҠҘм„ұмқ„ ліҙм—¬мЈјм—ҲлӢӨ. мқҙнӣ„ 2010л…„ лҜёкөӯ Googleм—җм„ң <к·ёлҰј 3>м—җм„ң ліҙлҠ” л°”мҷҖ к°ҷмқҖ л¬ҙмқё мһҗмңЁ мЈјн–ү мһҗлҸҷм°ЁлҘј мҶҢк°ңн•ҳмҳҖлӢӨ. м°Ёлҹүм—җлҠ” мғҒлӢЁм—җ Velodyneмқҳ 360лҸ„лҘј мҠӨмә”н•ҳм—¬ 3-D м§ҖлҸ„лҘј мғқм„ұн• мҲҳ мһҲлҠ” л ҲмқҙлҚ”к°Җ мһҘм°©лҗҳм–ҙ мһҲлӢӨ<к·ёлҰј 4>. мқҙ мһҗлҸҷм°Ёмқҳ мӢ лў°лҸ„лҘј кІҖмҰқн•ҳкё° мң„н•ҳм—¬ мӢӨн—ҳмЈјн–үмңјлЎң 1,600km мқҙмғҒмқ„ л¬ҙмқёмңјлЎң мЈјн–үн•ҳмҳҖмңјл©° мқҙнӣ„ 22л§Ң 5мІңkm мқҙмғҒмқ„ л¬ҙмқёмңјлЎң мЈјн–үн–ҲлӢӨкі ліҙкі н•ҳкі мһҲлӢӨ. лҚ” лӮҳм•„к°Җ мқҙлҹ¬н•ң м°Ёлҹүмқҙ н•©лІ•м ҒмңјлЎң мЈјн–үн• мҲҳ мһҲлҠ” лІ•лҘ мқҙ лҜёкөӯ л„Өл°”лӢӨ мЈјм—җм„ңлҠ” 2011л…„лҸ„ 6мӣ”м—җ нҶөкіјлҗҳм—ҲлӢӨ.
л§ҺмқҖ мһҗлҸҷм°Ё нҡҢмӮ¬л“ӨлҸ„ м ңн•ңлҗң көҗнҶө нҷҳкІҪм—җм„ң мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң мӢңмҠӨн…ңмқ„ мқҙлҜё к°ңл°ңн•ҳкі н…ҢмҠӨнҠёлҘј 진н–үн•ҳкі мһҲлӢӨ. лҢҖн‘ңм ҒмңјлЎң BMW, Audi, Volkswagen л“ұмқҙ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ л¬ҙмқё мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң м°Ёлҹүмқ„ м„ ліҙмҳҖмңјл©°, 2011л…„м—җлҠ” Mercedes-Benzм—җм„ң 2013л…„ S-classм°Ёлҹүм—җ л ҲмқҙлҚ”мҷҖ л№„м „м„јм„ңлҘј мқҙмҡ©н•ҳм—¬ көҗнҶөмІҙмҰқмқҙ м–ҙлҠҗ м •лҸ„ мһҲлҠ” мғҒнҷ©м—җм„ң м°Ём„ мқ„ л”°лқј л¬ҙмқё мһҗмңЁ мЈјн–үмқҙ к°ҖлҠҘн•ң кё°лҠҘмқ„ 추к°Җн•ҳкІ лӢӨкі л°ңн‘ңн•ҳмҳҖлӢӨ.
3. нҶөмӢ кё°л°ҳ мқём§Җ кё°мҲ
2009л…„лҸ„ 12мӣ”м—җ л°ңн‘ңн•ң лҜёкөӯ көҗнҶөкөӯ ITS(Intelligent Transportation Systems) Strategic Research Plan (2010~2014л…„)м—җ мқҳн•ҳл©ҙ м—°кө¬ к°ңл°ң м „лһөмқ„ нҒ¬кІҢ м°Ёлҹү, мқён”„лқј, к·ёлҰ¬кі ліҙн–үмһҗмқҳ ITкё°кё°лҘј м—°кІ°н•ҳм—¬ м•Ҳм „м„ұ, мқҙлҸҷм„ұ, к·ёлҰ¬кі м№ңнҷҳкІҪм„ұмқҳ нҡЁмңЁмқ„ мөңлҢҖнҷ” н•ҳкё° мң„н•ң кё°мҲ лЎң мҡ”м•Ҫн• мҲҳ мһҲлӢӨ. мқҙ мӨ‘ м•Ҳм „м„ұм—җ кҙҖл Ёлҗң кё°мҲ мқҖ мқҙлҜё мқҙм „л¶Җн„° Cooperative Intersection Collision Avoidance System(CICAS)лӮҳ IntelliDriveмҷҖ
к°ҷмқҖ н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ к¶Ғк·№м Ғмқё лӘ©н‘ңлҘј мқҙлЈЁкё° мң„н•ҙ 진н–үлҗҳкі мһҲлӢӨ.
мқјліёмқҳ кІҪмҡ° Smartway 21 н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ м•Ҳм „н•ҳкі нҺём•Ҳн•ң лҸ„лЎң мҡҙн–ү мӢңмҠӨн…ң к°ңл°ңмқ„ лӘ©н‘ңлЎң 3лӢЁкі„(2000~2015л…„)лҘј 진н–үн•ҳкі мһҲмңјл©° мң лҹҪмқҳ кІҪмҡ° i2020 Intelligent Car Initiative м•„лһҳ м—¬лҹ¬ лҢҖнҳ• н”„лЎңм қнҠём—җ м—°кө¬к°ңл°ң нҲ¬мһҗлҘј н•ҳкі мһҲлӢӨфҖ•Ј-фҖ•Ө. мҳҲлҘј л“Өм–ҙ PReVENT, CVIS, SAFESPOT л“ұ лӢӨм–‘н•ң н”„лЎңм қнҠёлҘј нҶөн•ҳм—¬ м°Ёлҹүкіј мқён”„лқјлҘј м—°кі„н•ң мІЁлӢЁ мЈјн–үнҷҳкІҪмқ„ к°ңл°ңн•ҳкі мһҲлӢӨ.
мҡ°лҰ¬лӮҳлқјмқҳ кІҪмҡ° 2007л…„л¶Җн„° мҠӨл§ҲнҠё н•ҳмқҙмӣЁмқҙмӮ¬м—…мқҙлқјлҠ” мқҙлҰ„мңјлЎң IT, мһҗлҸҷм°Ё, к·ёлҰ¬кі лҸ„лЎң кё°мҲ мқ„ мңөвҲҷліөн•©н•ҳм—¬ мӢӨмӢңк°„мңјлЎң м •ліҙлҘј кіөмң н•ҳкі м „мІңнӣ„, мЈјм•јк°„ м•Ҳм „мЈјн–ү м§Җмӣҗкё°мҲ кө¬нҳ„мқ„ лӘ©н‘ңлЎң лҜёлһҳмқҳ м§ҖлҠҘнҳ• кі мҶҚлҸ„лЎң к°ңл°ң м—°кө¬лҘј 진н–үн•ҳкі мһҲлӢӨ.
м°Ёлҹү к°„(V2V) лҳҗлҠ” м°Ёлҹүкіј мқён”„лқј к°„(V2I) нҶөмӢ мқ„ мқҙмҡ©н•ң м•Ҳм „м„ұ м ңкі л°©лІ•мңјлЎңлҠ” мЈјліҖ лҸҢл°ң мң„н—ҳ мғҒнҷ© лҳҗлҠ” кё°мғҒм •ліҙлҘј мҡҙм „мһҗм—җкІҢ м „лӢ¬н•ҙ мЈјкұ°лӮҳ, мҡҙм „мһҗк°Җ нҠ№нһҲ л…ём•Ҫмһҗмқҳ кІҪмҡ° көҗм°ЁлЎң лӮҳ 비ліҙнҳё мўҢнҡҢм „ м§Җм—ӯмқ„ нҸ¬н•Ён•ҙм„ң мӮ¬кі лӢӨл°ң м§Җм—ӯм—җм„ң мўҖ лҚ” м•Ҳм „м ҒмңјлЎң мҡҙм „мқ„ мң лҸ„н•ҙ мЈјлҠ” л°©лІ• л“ұмқҙ мһҲлӢӨ.
лҜёкөӯ, мң лҹҪ, мқјліёмқҖ 2000л…„лҢҖ мҙҲвҲҷмӨ‘л°ҳл¶Җн„° м—°кө¬лҘј 진н–үн•ҙмҷ”мңјл©° мҳҲлҘј л“Өм–ҙ лҜёкөӯмқҳ кІҪмҡ° 2003л…„м—җ VII(Vehicle Infrastructure Integration)лқјлҠ” н”„лЎңм қнҠёлҘј мӢңмһ‘н•ҳм—¬ DSRC(Dedicated Short-Range Communications) кё°л°ҳ V2VмҷҖ V2I нҶөмӢ мқ„ к°ңл°ңн•ҳмҳҖмңјл©° 2009л…„м—җ IntelliDriveлқјлҠ” н”„лЎңм қнҠё лӘ…мңјлЎң м „нҷҳмқҙ лҗҳм—ҲлӢӨ.
лҜёкөӯ IntelliDrive н”„лЎңм қнҠёмқҳ кІҪмҡ° V2VмҷҖ V2I нҶөмӢ мқ„ мң„н•ҳм—¬ 5.9GHz лҢҖм—ӯмқҳ WAVE (Wireless Accessin Vehicular Environments) нҶөмӢ кё°мҲ мқҙ мЈјлЎң мӮ¬мҡ©лҗҳм—Ҳмңјл©° 2013л…„ мғҒмҡ©нҷ”к°Җ мҳҲмғҒлҗңлӢӨ. мң лҹҪлҸ„ WAVE нҶөмӢ мӢңм ңн’Ҳмқ„ мӢңлІ”мӮ¬м—…м—җ м Ғмҡ© л°Ҹ кё°мҲ кІҖмҰқ л“ұмқ„ нҶөн•ҳм—¬ мғҒмҡ©нҷ”м—җ лҢҖ비н•ҳкі мһҲлӢӨ.

4. мҡҙм „мһҗ мқём§Җ кё°мҲ
л№„м „м„јм„ңлҘј кё°л°ҳмңјлЎң мҡҙм „мһҗмқҳ лҲҲкәјн’Җмқ„ мқём§Җн•ҳм—¬ мЎёмқҢмқ„ к°җм§Җн•ҳм—¬ кІҪкі лҘј мЈјлҠ” мӢңмҠӨн…ң к°ңл°ңмқҖ мҳҲм „л¶Җн„° 진н–үмқҙ лҗҳм–ҙ мҷ”мңјл©° Fordмқҳ Driver Alert, Mercedes-Benzмқҳ Attention Assist, Volkswagenмқҳ Fatigue Detection System, Volvoмқҳ Driver Alert Controlм—җ мқҙлҘҙкё°к№Ңм§Җ лӢӨм–‘н•ң мқҙлҰ„мңјлЎң мғҒмҡ©нҷ”к°Җ лҗҳм–ҙ мҷ”лӢӨ.

2010л…„м—җ мғҲлЎӯкІҢ к°ңл°ңлҗң Mercedes-Benzмқҳ Attention AssistлҠ” мҡҙм „мһҗмқҳ н–үлҸҷмқ„ к°җмӢңн•ҳлҠ” мҲҳмӢӯ к°ңмқҳ м„јм„ңмҷҖ нҸүмҶҢмқҳ мҡҙм „мҠөкҙҖмқ„ кё°м–өн•ҳкё° мң„н•ң м ҖмһҘмһҘм№ҳлЎң мқҙлЈЁм–ҙм ё мһҲлӢӨ. мҡҙм „мһҗк°Җ мӢңлҸҷмқ„ кұёкі м¶ңл°ңн•ҳл©ҙ мІҳмқҢ 20м—¬ 분간мқҳ мЈјн–ү нҢЁн„ҙмқ„ кё°лЎқн•ңлӢӨ. мҰү лҸ„лЎң мғҒнҷ©м—җ л§һкІҢ мҠӨнӢ°м–ҙл§Ғ нң мқ„ мӣҖм§Ғмқҙкұ°лӮҳ м—‘м…Җкіј лёҢл ҲмқҙнҒ¬ нҺҳлӢ¬мқ„ мЎ°мһ‘н•ҳлҠ”м§ҖлҘј к°җмӢңн•ҳлӢӨк°Җ нҸүмҶҢмҷҖ лӢӨлҘё н–үлҸҷмқ„ ліҙмқҙл©ҙ мҡҙм „мһҗк°Җ мЎёмқҢмҡҙм „мқ„ н•ҳлҠ” кІғмңјлЎң мқёмӢқн•ңлӢӨ. мЎёмқҢмқҙ л°Җл ӨмҳӨкё° мү¬мҡҙ кі мҶҚлҸ„лЎңлҘј лӢ¬лҰ¬кұ°лӮҳ м•јк°„м—җ мҡҙм „м„қм—җ мҳӨлҘё кІҪмҡ° мӢңмҠӨн…ңмқҙ лҚ”мҡұ лҜјк°җн•ҙм§Җл©° л§Ңм•Ҫ мҡҙм „мһҗк°Җ мЎёмқҢмҡҙм „мқ„ н•ңлӢӨкі нҢҗлӢЁлҗҳл©ҙ мҡҙм „мһҗм—җкІҢ кІҪкі лҘј мӨҖлӢӨ.
мң„м—җм„ң мҶҢк°ңлҗң мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғ мӢңмҠӨн…ңмқҖ к·ё мһҗмІҙлЎң лҠҘлҸҷнҳ• м•Ҳм „ мӢңмҠӨн…ңм—җ м Ғмҡ©лҗ мҲҳ мһҲлҠ” мӨ‘мҡ”кё°мҲ мқҙм§Җл§Ң н–Ҙнӣ„ мқ‘мҡ©лІ”мң„к°Җ лҚ”мҡұ нҷ•лҢҖлҗ кІғмңјлЎң м „л§қмқҙ лҗҳкі мһҲлӢӨ. нҠ№нһҲ лӢЁмҲң н…”л Ҳл§ӨнӢұмҠӨ мҲҳмӨҖмқ„ лІ—м–ҙлӮҳ мқёнҸ¬н…ҢмқёлЁјнҠёмқҳ нҷ•лҢҖ л°Ҹ нҒҙлқјмҡ°л“ңмқҳ кІ°н•©к№Ңм§Җ, ITвҲҷл°ҳлҸ„мІҙ кё°мҲ кіј мңөн•©н•ңвҖҳм»Өл„ҘнӢ°л“ң(Connected) м№ҙвҖҷлҠ” мһҗлҸҷм°Ё м—…кі„ лҜёлһҳмғҒмңјлЎңлҸ„ мҳҲмғҒлҗҳкі мһҲлӢӨ. мқҙлҹ¬н•ң м»Өл„ҘнӢ°л“ң м№ҙ мӢңмһҘмқ„ м„ м җн•ҳкё° мң„н•ҙ мһҗлҸҷм°Ё м—…мІҙлҘј мӨ‘мӢ¬мңјлЎң к°Ғ 분야별 мЈјмҡ” кё°м—…л“Өк°„ н•©мў…м—°нҡЎлҸ„ нҷңл°ңн•ҳлӢӨ. мҳҲлҘј л“Өл©ҙ м°Ёлҹү лӮҙ м•ұмҠӨнҶ м–ҙ м„ң비мҠӨ(BMW), кө¬кёҖл§өмқ„ нҷңмҡ©н•ң лӮҙ비кІҢмқҙм…ҳ(Audi), мҠӨл§ҲнҠёнҸ° м•ұмқ„ нҷңмҡ©н•ң нҠёмң„н„° л©”мӢңм§Җмқҳ м°Ёлҹү лӮҙ нҷ•мқё(Ford), мқҢм„ұ мқёмӢқмқ„ нҶөн•ң нҺҳмқҙмҠӨл¶Ғмқҳ мғҒнғң м •ліҙ м—…лҚ°мқҙнҠё, LTEл§қмқ„ мқҙмҡ©н•ҳлҠ” н…”л Ҳл§ӨнӢұмҠӨ(GM) л“ұмқҙ мһҲмңјл©° мқҙлҹ¬н•ң кё°мҲ мқҳ мһҮлӢЁ м¶ңнҳ„мқҖ м»Өл„ҘнӢ°л“ң м№ҙмқҳ мғҒмҡ©нҷ”к°Җ к°ҖмҶҚнҷ”лҗҳкі мһҲмқҢмқ„ м—¬мӢӨнһҲ ліҙм—¬мӨҖлӢӨ.
н•ҳм§Җл§Ң м»Өл„ҘнӢ°л“ң м№ҙм—җ кҙҖл Ёлҗң кё°мҲ мқҖ мҡҙм „мһҗмқҳ 집мӨ‘лҸ„лҘј нҳ„м ҖнһҲ м Җн•ҳмӢңнӮ¬ мҲҳ мһҲмңјл©° мЎёмқҢмқҙлӮҳ мқҢмЈјмҡҙм „ лӘ»м§Җм•ҠкІҢ мӮ¬кі мң л°ңм—җ м№ҳлӘ…м Ғмқё мӣҗмқё лҗ мҲҳ мһҲмқҢмқ„ лҲ„кө¬лҸ„ л¶Җмқён• мҲҳ м—ҶлӢӨ. л”°лқјм„ң м»Өл„ҘнӢ°л“ң м№ҙмқҳ мғҒмҡ©нҷ”лҘј к°ҖмҶҚнҷ”н•ҳкё° мң„м—җм„ң м–ёкёүлҗң мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғ кё°мҲ мқҳ нҷ•лҢҖ м Ғмҡ©мқҙ л¶Ҳк°Җн”јн•ҙ ліҙмқёлӢӨ.
5. кІ°лЎ
кё°мЎҙмқҳ м§ҖлҠҘнҳ• м•Ҳм „ мһҗлҸҷм°Ё кё°мҲ мқҙ нҶөмӢ л°Ҹ ITкё°мҲ мқҙ м ‘лӘ©лҗҳм–ҙ мЈјліҖ м°Ёлҹүкіјмқҳ м•Ҳм „м„ұ нҷ•ліҙм—җм„ң мўҖ лҚ” лІ”мң„к°Җ нҷ•мһҘлҗҳкі мһҲмңјл©° м°Ёлҹү лӮҙл¶Җмқҳ мҡҙм „мһҗ лӘЁлӢҲн„°л§Ғмқ„ нҶөн•ҳм—¬ мҡҙм „мһҗ м№ңнҷ”нҳ• м•Ҳм „ мӢңмҠӨн…ңмңјлЎң 진нҷ”н•ҳкі мһҲлӢӨ. мқҙлҹ¬н•ң мӢңмҠӨн…ңмқ„ к°ңл°ңн•ҳкі мғҒмҡ©нҷ”н•ҳкё° мң„н•ҙм„ңлҠ” мқём§ҖлҘј мң„н•ң м„јм„ң к°ңл°ңкіј мӢ нҳёмІҳлҰ¬, к·ёлҰ¬кі м„јм„ңмңөн•©кё°мҲ мқҙ м„ н–үлҗҳм–ҙм•ј н•ңлӢӨ. лҳҗн•ң кіјкұ° м°Ёлҹүкё°л°ҳ м•Ҳм „ кё°мҲ к°ңл°ң нҢЁлҹ¬лӢӨмһ„м—җм„ң мҠӨл§ҲнҠёнҸ°мқ„ 비лЎҜн•ң л¬ҙм„ мқён„°л„· кё°мҲ л°Ҹ IT кё°мҲ мқҳ кёүм„ұмһҘм—җ л°ңл§һ추м–ҙ мўҖ лҚ” мӢңмһҘм„ұмқҙ мһҲкі мғҒмҡ©нҷ” к°ҖлҠҘм„ұмқҙ нҒ° кё°мҲ к°ңл°ңлЎң м „нҷҳлҗҳкі мһҲлҠ” мӢңм җмқҙл©° мқҙлҘј мң„н•ң мҡҙм „мһҗ м№ңнҷ”нҳ• м•Ҳм „ кё°мҲ к°ңл°ңмқҙ мӢңкёүн•ҳл©° нҠ№нһҲ мҡҙм „мһҗмқҳ нҠ№м„ұмқ„ кі л Өн•ҳлҠ” м°Ём„ёлҢҖ м•Ҳм „ мӢңмҠӨн…ң к°ңл°ңмқ„ мң„н•ң мқём§Җ кё°мҲ мқҳ мӨ‘мҡ”м„ұмқ„ к°•мЎ°н•ҳкі мһҗ н•ңлӢӨ.