
스마트 자동차의 통합안전제어기술
페이지 정보
글 : 채영석(webmaster@global-autonews.com)|
|
승인 2012-06-19 13:28:48 |



본문
스마트 자동차의 통합안전제어기술
1. 서론
자동차 기술 개발에 있어서 에너지 문제와 함께 핵심 키워드는‘안전하고 편리한 차세대 자동차’이다. 예전부터 자동차 업계는 사고 시 운전자를 보호하기 위하여 많은 연구를 진행해 왔으며, 차량 내 운전자 편의장치를 개발, 도입해 왔다. 그리고 최근에 능동 제어 장치가 도입, 차량이 능동적으로 주위 상황에 대처하는‘스마트 자동차(Smart Vehicle)’의 개발이 가속화되고 있다. 스마트 자동차는 기존 자동차에 위험 상황에서 사고를 회피 또는 사고 충격을 경감시켜주는 능동안전(Active Safety) 시스템과 운전자의 가/감속 입력 등을 대신하여 운전자의 운전 부하를 감소시켜 주고 편의성을 증대시켜 주는 운전자 지원(Driver Assistance) 시스템이 장착, 보다‘안전하고 편리한 차세대 자동차’를 현실화 시켜 나가고 있다.
글 / 이경수, 최재웅 (서울대학교)
출처 / 한국자동차공학회 오토저널 2012년 6월호
수동안전 시스템의 개발로 인하여 국내 사망자수의 감소 역시 나타나고 있지만, 외국의 예에서 확인 가능하듯이 능동안전 기술의 적극적인 적용으로 사고 자체를 회피함으로써 사망자수의 비약적인 감소를 가져올수 있을 것으로 보인다.
2. 스마트 자동차 안전 기술
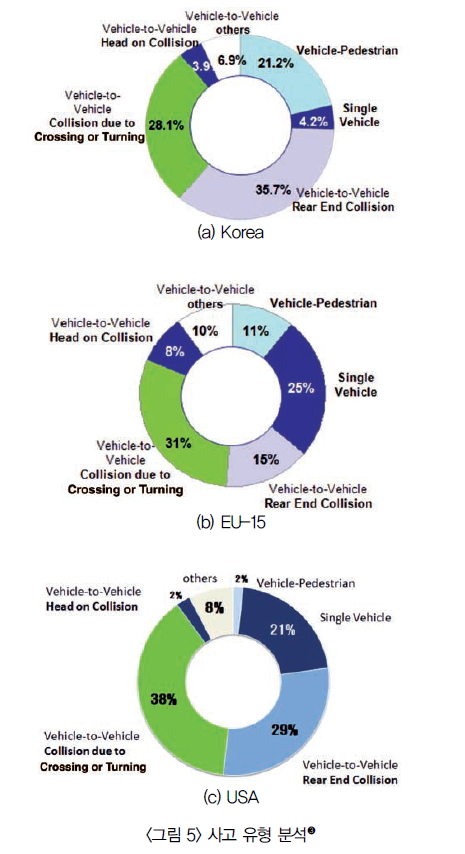
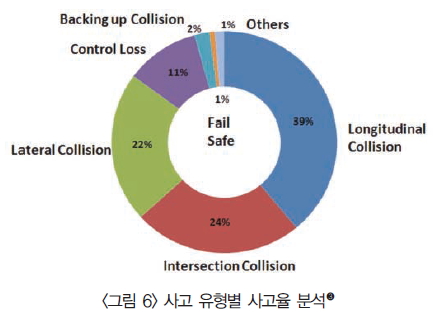
사고 유형은 <그림 6>에서 보듯이 크게 주행 중 차량간 종 방향 충돌, 주행 중 횡 방향 충돌, 교차로 사고, 차량 미끄러짐 등 조작 불능 상태, 후진 중 충돌 등으로 구분할 수 있다.
종 방향 운전지원 시스템인 지능형 순항 제어(SCC, Smart Cruse Control) 또한 종 방향 충돌 사고 예방 효과가 있다. 이 시스템은 운전자를 대신하여 선행 차량과의 거리 및 속도를 측정하여 선행 차량과 적절한 거리를 자동으로 유지한다. 이 시스템은 운전자의 운전 부담을 경감시켜 주며, 동시에 위험 경감의 효과도 있다. 지능형 순항 제어는 모든 속도 영역과 도로 환경으로 그 적용이 확대되고 있다.
횡 방향 충돌의 경우에는 차선 변경 중 사고가 가장 높은 비중을 차지한다. 차선 변경 중 접근 차량을 인지하지 못하여 사고가 나는 경우이다. 사각에서 위험 차량이 접근할 경우, 사각 인지 경보(BSW, Blind Spot Warning) 시스템은 사각에서 접근하는 차량을 인지, 운전자에게 경보를 한다. 횡 방향 충돌의 또 다른 유형으로 의도치 않은 차선 이탈 사고가 높은 비중을 차지한다. 운전자가 졸음, 부주의 등으로 차선을 이탈하게 되어 사고가 나는 경우이다. 운전자가 의도 하지 않은 차선 이탈이 일어날 경우, 차선 이탈 경고 시스템 (LDWS, Lane Departure Warning System)이 작동하여 운전자에게 경보를 주게 된다. 최근에는 차선 이탈을 능동적으로 방지하는 차선 이탈 방지 시스템(LDPS, Lane Departure Prevention System)과 차선 유지 보조 시스템(LKAS, Lane Keeping Assistance System) 등이 개발 보급되고 있다.
차량의 주행 중 조작 불능 상태에 이르게 되어 일어나는 사고는 차량의 안정성 확보와 크게 연관되어 있다. 미끄러운 노면을 주행 중에 일반적인 노면과 같은 조작을 가하게 되면 차량이 지면 위에서 미끄러지면서안정성을 잃는다. 이러한 현상을 방지하고 안정성을 확보하기 위하여 전자식 안정성 제어(ESC, Electronic Stability Control) 기술이 적용되고 있다. 이는 차량의 차등 제동을 활용하여 차량의 오버스티어 (Oversteer), 언더스티어(Understeer) 현상을 방지하는 기술이다. 이 외에도 능동 조향 시스템(AFS, Active Front Steering), 가변 감쇠 제어 (CDC, Continuous Damping Control) 등 다양한 차량 섀시 제어시스템이 개발, 적용되고 있다.
후진 중 사고는 주차 보조 시스템과 밀접하게 연관된다. 운전자가 주차 중 사고를 일으키는 경우가 많기때문에 주차의 운전자 보조 시스템인 주차 조향 보조 시스템(SPAS, Smart Parking Assist System)이 적용되었다. 이 시스템은 주차 중에 조향 조작을 자동화하여 주차 시 운전 부하를 감소시켜, 주차 중 사고 가능성을 낮춰준다.
3. 스마트 자동차 통합 안전 제어 기술
‘안전하고 편리한 자동차’의 개발을 위하여 여러 능동안전 시스템과 운전자 지원 시스템이 개발되었다. 위에서 언급한 여러 시스템을 차량에 적용시키기 위하여 차량용 ECU(Electronic Control Unit)를 비롯하여, 레이더 센서, 카메라, 초음파 센서 등 외부 센서 시스템을 장착하고, 전동식 파워 스티어링(MDPS, Motor Driven Power Steering), 차등 제동 시스템(Differential Braking System), 반 능동 서스펜션 시스
템(Semi-Active Suspension) 등 액추에이터 (Actuator) 시스템이 탑재되었다.
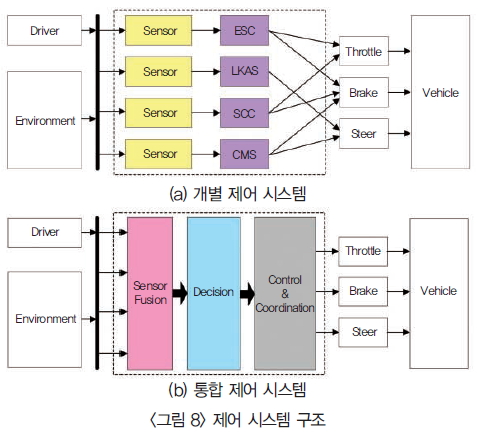
따라서 차세대‘스마트 자동차’는 능동안전 기능과 운전자 지원 기능들을 통합하여 충돌의 여지를 제거하고, 동시에 개별센서, 액추에이터 시스템의 협력으로 기능 향상 및 신기능 구현을 도모하고 있다.
통합 안전 제어 시스템은 인지, 판단, 제어 기술로 구분된다. 레이더, 카메라, 초음파 센서 등의 외부 센서 시스템의 정보를 통합하여 전방, 측방, 차선, 노면 상태 등 외부 환경 요인을 통합 인지한다. 통합된 인지 정보를 바탕으로 현재 전방 및 측방 충돌 위험, 차량 안정성, 차선 이탈 위험 등과 현재 운전자 상태를 인식하여 통합적으로 현재 상황을 판단한다. 다음 단계에서는 통합적으로 주변 위험을 인지하여 위험을 회피하기 위한 차량의 목표 거동을 결정한다. 제어 단계에서는 차량의 목표 속도, 횡 방향 거동 등이 결정되면, 그 목표 거동을 추종하기 위하여 모든 엑추에이터의 제어량을 결정한다.
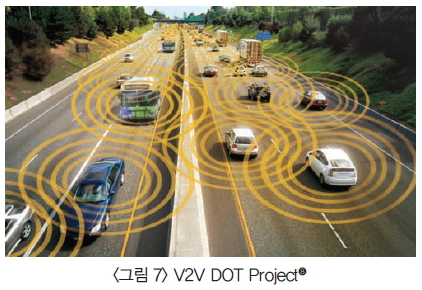
최근에는 센서 기술과 차량간 그리고 차량-인프라간 통신 기술의 발전으로 인지 영역이 확장됨에 따라서 고속도로 자율 주행(Highway Autonomous Vehicle), 커넥티드 스마트 자동차(Connected Smart Vehicle), 충돌 안전 자동차(Crash-Free Vehicle) 등의 개발이 가속화되고 있으며, 나아가서는 준 자율 주행 차량(Semi-Autonomous Vehicle), 그리고 완전 자율 주행 차량(Autonomous Vehicle)의 개발도 진행되고 있다.
4. 결론
스마트 자동차(Smart Vehicle)는‘안전하고 편리한 자동차’의 요구에 대한 기술적 대답이다. 이를 실현시키기 위해서는 다양한 센서 신호를 종합하여 현재 상황에 대한 보다 정확한 정보를 산출해내는 통합 인지기술, 현재 정보를 종합하여 운전자 상태와 외부 차량과의 충돌 가능성 등 위험 정도를 판단하고 통합 제어기의 개입 여부를 판단하는 통합 판단 기술, 그리고 충돌을 비롯한 위험 상황을 회피하기 위하여 운전자를 보조, 또는 능동적으로 개입하는 제어 기술의 개발이 필요하다. 이외에 통합 제어 알고리즘 구현 기술과 센서, 제어기, 엑추에이터의 고장을 진단하고 대응하는 고장 안전(Fail-Safe)기술 등 기반 기술들의 확보가 필요하다.
스마트 자동차 분야의 선도기술을 확보하는 것이 향후 자동차 산업 경쟁력 확보에 중요한 요소가 될 것으로 보인다. 따라서 산업체-대학-연구소 간의 산학연 협력 관계의 구축을 통하여 국내 독자 기술 확보와 우수 인력 양성이 앞으로 필요할 것으로 보인다.
1. 서론
자동차 기술 개발에 있어서 에너지 문제와 함께 핵심 키워드는‘안전하고 편리한 차세대 자동차’이다. 예전부터 자동차 업계는 사고 시 운전자를 보호하기 위하여 많은 연구를 진행해 왔으며, 차량 내 운전자 편의장치를 개발, 도입해 왔다. 그리고 최근에 능동 제어 장치가 도입, 차량이 능동적으로 주위 상황에 대처하는‘스마트 자동차(Smart Vehicle)’의 개발이 가속화되고 있다. 스마트 자동차는 기존 자동차에 위험 상황에서 사고를 회피 또는 사고 충격을 경감시켜주는 능동안전(Active Safety) 시스템과 운전자의 가/감속 입력 등을 대신하여 운전자의 운전 부하를 감소시켜 주고 편의성을 증대시켜 주는 운전자 지원(Driver Assistance) 시스템이 장착, 보다‘안전하고 편리한 차세대 자동차’를 현실화 시켜 나가고 있다.
글 / 이경수, 최재웅 (서울대학교)
출처 / 한국자동차공학회 오토저널 2012년 6월호
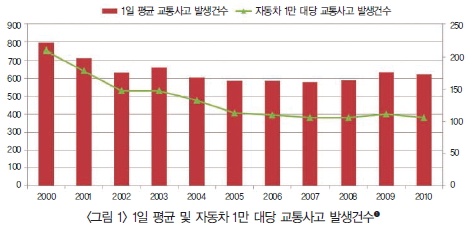
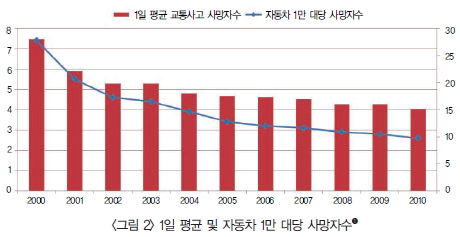
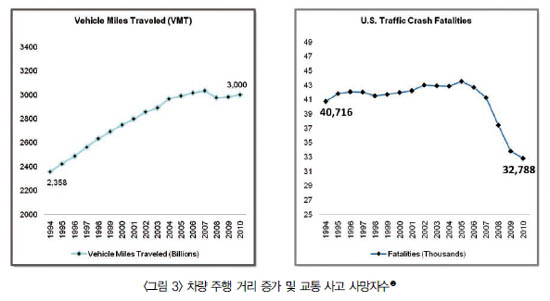
수동안전 시스템의 개발로 인하여 국내 사망자수의 감소 역시 나타나고 있지만, 외국의 예에서 확인 가능하듯이 능동안전 기술의 적극적인 적용으로 사고 자체를 회피함으로써 사망자수의 비약적인 감소를 가져올수 있을 것으로 보인다.
2. 스마트 자동차 안전 기술
사고 유형은 <그림 6>에서 보듯이 크게 주행 중 차량간 종 방향 충돌, 주행 중 횡 방향 충돌, 교차로 사고, 차량 미끄러짐 등 조작 불능 상태, 후진 중 충돌 등으로 구분할 수 있다.
종 방향 운전지원 시스템인 지능형 순항 제어(SCC, Smart Cruse Control) 또한 종 방향 충돌 사고 예방 효과가 있다. 이 시스템은 운전자를 대신하여 선행 차량과의 거리 및 속도를 측정하여 선행 차량과 적절한 거리를 자동으로 유지한다. 이 시스템은 운전자의 운전 부담을 경감시켜 주며, 동시에 위험 경감의 효과도 있다. 지능형 순항 제어는 모든 속도 영역과 도로 환경으로 그 적용이 확대되고 있다.
횡 방향 충돌의 경우에는 차선 변경 중 사고가 가장 높은 비중을 차지한다. 차선 변경 중 접근 차량을 인지하지 못하여 사고가 나는 경우이다. 사각에서 위험 차량이 접근할 경우, 사각 인지 경보(BSW, Blind Spot Warning) 시스템은 사각에서 접근하는 차량을 인지, 운전자에게 경보를 한다. 횡 방향 충돌의 또 다른 유형으로 의도치 않은 차선 이탈 사고가 높은 비중을 차지한다. 운전자가 졸음, 부주의 등으로 차선을 이탈하게 되어 사고가 나는 경우이다. 운전자가 의도 하지 않은 차선 이탈이 일어날 경우, 차선 이탈 경고 시스템 (LDWS, Lane Departure Warning System)이 작동하여 운전자에게 경보를 주게 된다. 최근에는 차선 이탈을 능동적으로 방지하는 차선 이탈 방지 시스템(LDPS, Lane Departure Prevention System)과 차선 유지 보조 시스템(LKAS, Lane Keeping Assistance System) 등이 개발 보급되고 있다.
차량의 주행 중 조작 불능 상태에 이르게 되어 일어나는 사고는 차량의 안정성 확보와 크게 연관되어 있다. 미끄러운 노면을 주행 중에 일반적인 노면과 같은 조작을 가하게 되면 차량이 지면 위에서 미끄러지면서안정성을 잃는다. 이러한 현상을 방지하고 안정성을 확보하기 위하여 전자식 안정성 제어(ESC, Electronic Stability Control) 기술이 적용되고 있다. 이는 차량의 차등 제동을 활용하여 차량의 오버스티어 (Oversteer), 언더스티어(Understeer) 현상을 방지하는 기술이다. 이 외에도 능동 조향 시스템(AFS, Active Front Steering), 가변 감쇠 제어 (CDC, Continuous Damping Control) 등 다양한 차량 섀시 제어시스템이 개발, 적용되고 있다.
후진 중 사고는 주차 보조 시스템과 밀접하게 연관된다. 운전자가 주차 중 사고를 일으키는 경우가 많기때문에 주차의 운전자 보조 시스템인 주차 조향 보조 시스템(SPAS, Smart Parking Assist System)이 적용되었다. 이 시스템은 주차 중에 조향 조작을 자동화하여 주차 시 운전 부하를 감소시켜, 주차 중 사고 가능성을 낮춰준다.
3. 스마트 자동차 통합 안전 제어 기술
‘안전하고 편리한 자동차’의 개발을 위하여 여러 능동안전 시스템과 운전자 지원 시스템이 개발되었다. 위에서 언급한 여러 시스템을 차량에 적용시키기 위하여 차량용 ECU(Electronic Control Unit)를 비롯하여, 레이더 센서, 카메라, 초음파 센서 등 외부 센서 시스템을 장착하고, 전동식 파워 스티어링(MDPS, Motor Driven Power Steering), 차등 제동 시스템(Differential Braking System), 반 능동 서스펜션 시스
템(Semi-Active Suspension) 등 액추에이터 (Actuator) 시스템이 탑재되었다.
따라서 차세대‘스마트 자동차’는 능동안전 기능과 운전자 지원 기능들을 통합하여 충돌의 여지를 제거하고, 동시에 개별센서, 액추에이터 시스템의 협력으로 기능 향상 및 신기능 구현을 도모하고 있다.
통합 안전 제어 시스템은 인지, 판단, 제어 기술로 구분된다. 레이더, 카메라, 초음파 센서 등의 외부 센서 시스템의 정보를 통합하여 전방, 측방, 차선, 노면 상태 등 외부 환경 요인을 통합 인지한다. 통합된 인지 정보를 바탕으로 현재 전방 및 측방 충돌 위험, 차량 안정성, 차선 이탈 위험 등과 현재 운전자 상태를 인식하여 통합적으로 현재 상황을 판단한다. 다음 단계에서는 통합적으로 주변 위험을 인지하여 위험을 회피하기 위한 차량의 목표 거동을 결정한다. 제어 단계에서는 차량의 목표 속도, 횡 방향 거동 등이 결정되면, 그 목표 거동을 추종하기 위하여 모든 엑추에이터의 제어량을 결정한다.
최근에는 센서 기술과 차량간 그리고 차량-인프라간 통신 기술의 발전으로 인지 영역이 확장됨에 따라서 고속도로 자율 주행(Highway Autonomous Vehicle), 커넥티드 스마트 자동차(Connected Smart Vehicle), 충돌 안전 자동차(Crash-Free Vehicle) 등의 개발이 가속화되고 있으며, 나아가서는 준 자율 주행 차량(Semi-Autonomous Vehicle), 그리고 완전 자율 주행 차량(Autonomous Vehicle)의 개발도 진행되고 있다.
4. 결론
스마트 자동차(Smart Vehicle)는‘안전하고 편리한 자동차’의 요구에 대한 기술적 대답이다. 이를 실현시키기 위해서는 다양한 센서 신호를 종합하여 현재 상황에 대한 보다 정확한 정보를 산출해내는 통합 인지기술, 현재 정보를 종합하여 운전자 상태와 외부 차량과의 충돌 가능성 등 위험 정도를 판단하고 통합 제어기의 개입 여부를 판단하는 통합 판단 기술, 그리고 충돌을 비롯한 위험 상황을 회피하기 위하여 운전자를 보조, 또는 능동적으로 개입하는 제어 기술의 개발이 필요하다. 이외에 통합 제어 알고리즘 구현 기술과 센서, 제어기, 엑추에이터의 고장을 진단하고 대응하는 고장 안전(Fail-Safe)기술 등 기반 기술들의 확보가 필요하다.
스마트 자동차 분야의 선도기술을 확보하는 것이 향후 자동차 산업 경쟁력 확보에 중요한 요소가 될 것으로 보인다. 따라서 산업체-대학-연구소 간의 산학연 협력 관계의 구축을 통하여 국내 독자 기술 확보와 우수 인력 양성이 앞으로 필요할 것으로 보인다.