
자율주행자동차- 4. 자차 위치 추정 장비 개발에 속도
페이지 정보
글 : 채영석(webmaster@global-autonews.com)|
|
승인 2013-04-02 17:03:00 |



본문
2010년대를 관통할 화두는 자율주행자동차다. 지금 전 세계 자동차회사들은 자율주행자동차 시대를 위해 모든 역량을 집중하고 있다. 올 초 미국 라스베가스에서 열린 CES에서 아우디와 토요타자동차가 자율주행자동차 기술을 공개했다. 디트로이트오토쇼에서는 커넥티비티를 중심으로 한 내용이 쇼장을 장악하면서 자율주행자동차의 개발이 당초 예상보다 빨리 진행되고 있다는 것을 보여 주었다. 자율주행자동차의 실현에 필요한 기술 중 자차 위치를 정확하게 추정하는 것이다. 자율 주행 자동차 네 번째 이야기다.
글 / 채영석 (글로벌오토뉴스국장)
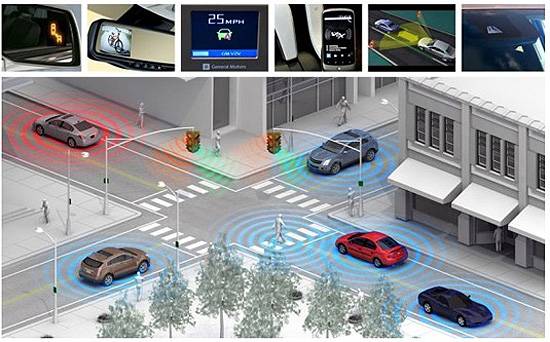
자율주행자동차의 실현을 위해서는 다양한 기술이 필요하다. '충돌하지 않는 자동차'라는 표현을 사용하는 일본의 경우에서 알 수 있듯이 안전이 최 우선이다. 그 안전을 보장하기 위한 기술은 자동차 자체에 카메라와 레이더, 센서 등을 설치해 주변의 다른 자동차나 장해물을 감지하는 것이 우선이다. 이 부분까지는 상당한 발전이 이루어져 있다.
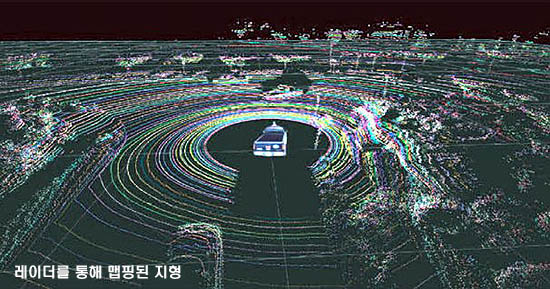
이 센서는 자동차의 아래쪽에 설계해 주변 360도에 수직 시야 26.8도의 3차원 공간에 있는 물체와 거리를 측정한다. 원통 중에 레이저 소자를 세로로 64개 설치해 약 20Hz의 주기로 해 실현한다.
무엇보다 중요한 것은 자차의 위치를 정확하게 추정하는 것이다. 과거 자동차회사들의 연구 대부분이 예를 들면 도로에의 마커 설치와 GPS의 정밀도를 높이는 등 인프라의 변경을 전제로 해 자차 위치를 추정해 왔다. 도로와 GPS 위성의 변경에는 거액의 자금이 필요로하고 공공물이기 때문에 한 기업으로서는 추진하기 어렵다. 결국 연구한 성과는 실현이 용이하지 않다는 결론에 도달했다.
그래도 자동차회사들 사이에서는 인프라가 필요하다는 생각이 강해 어느 기술자는 당초에는 반신반의했었다고 말하기도 했다. 전 세계 자동차회사들이 벨로다인사제 레이저 레이더에 쇄도하고 있는 것은 자신들이 검증해 의혹을 불식하겠다는 의미도 크다.
자율 이동 로봇의 개발에서 SLAM의 의의는 사전에 지도정보를 갖지 않고 움직이면서 현재 위치를 추정할 수 있다는 점에 있다. 하지만 자율주행차에서는 어느 정도 정확한 3차원 지도정보가 필요하게 된다. 자동차의 경우는 노면으로부터의 진동이 크고 레이더의 오차가 커질 수가 있기 때문이다. 오차가 큰 정보를 기준으로 SLAM으로 계산해도 자차 위치를 정확하게 추정하는 것은 어렵다. DARPA의 경기에서는 출발 하루 전에 지도정보를 건네주었다. 또 구글사는 자사의 비즈니스에 활용하기 위해 사전 준비된 지도의 개발에 주력하고 있다.
여기에 정보량을 더욱 줄여도 문제가 없는 것으로 알려졌다. 벨로다인사는 2011년 레이저 소자를 32개로 반감해 측정점을 70만점으로 줄인 HDL-32e를 발표했다. 벨로다인사에 따르면 자율주행에 필요한 정보량은 이정도로도 충분하다고 한다. 이미 토요타와 닛산 등이 구입해 검증하고 있다. 계산의 부하는 DARPA 때보다 더욱 적어졌다고. 정보량을 줄인 만큼 CPU가격이 내려가기 때문에 이 부분에 중점을 두고 있다.
최근에는 2~3년 후에는 기존 ECU(전자제어유닛)에 탑재하는 저렴한 마이콘으로 대응할 수 있을 것 같다고 전문가들은 내다 보고 있다.
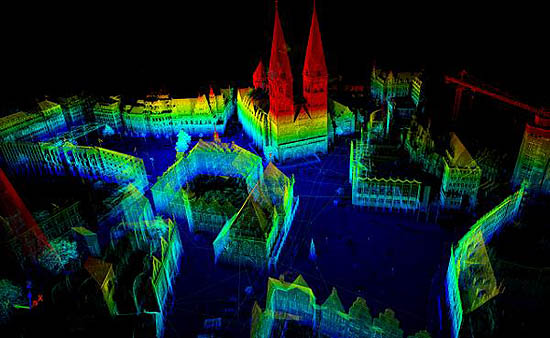
경로를 결정하려면 우선 주행 가능한 공간을 파악할 필요가 있다. 이 부분에 대한 일부 연구에 따르면 레이더로 측정한 주변 물체의 높이와 형상 등의 정보를 기초로 운전이 자유로울 수 있는 영역, 운전이 가능하도록 한 영역, 장해물의 영역, 미지의 영역으로 나뉜다. 그리고 카메라 등으로 장해물의 특징을 감지해 자동차와 사람등으로 분류한 후에 결과를 지도공간에 색으로 표시한다.
현재의 알고리즘도 어느정도 수준의 자율주행을 달성할 수 있다. 그러나 아직까지는 보이는 장해물에 대응해 차량을 움직이는 초보자 급의 운전이라고 할 수 있다. 최근 그것을 베테랑 운전자처럼 보이지 않는 위험을 고려한 운전에까지 진화시키고자 하는 연구가 활발하게 이루어지고 있다.
일본 동경농공대학대학원 교수는 운전학원 강사의 운전 수법을 실제로 조사하고 그 결과를 집계해 이것을 정형화했다. 이 공식에 따라 주행 공간의 위치에 따른 위험도와 자동차에 요구되는 감속도를 계산한다. 감속도에 따라 자동차의 속도를 결정하고 위험도가 높은 장소를 피하도록 타각을 제어한다.
복잡한 시스템이 필요
자율주행 자동차의 실용화를 위해서는 시스템의 신뢰성을 높이는 것도 중요하다. 각사가 특히 초점을 맞추고 있는 것이 컴퓨터 또는 통신의 신뢰성이다. 복잡한 시스템이 필요하다는 것이다.
지금 개발되고 있는 실험용차의 구성은 일반적으로 제어용과 감시용 컴퓨터를 사용하는 이중계로 통신에는 자동차 탑재 LAN의 CAN(Controller Area Network)을 사용한다. 실용화에 따라 지금보다 더 신뢰성을 높인 시스템이 필요하게 된다는 견해가 강하다.
닛산의 시스템은 세 개의 ECU가 각각을 상호 감시하는 삼중계로 하고 기계적인 백업 시스템을 설치하고 있다. 세 개라면 다수결에 의해 어느 ECU가 고장난 것인지를 알 수 있다. 반대로 ECU가 두 개라면 어느쪽이 고장났는지는 알 수 있지만 그 중 어느쪽이 고장났는지는 결정할 수 없다. 기계적인 백업이란 ECU와 모터 등의 고장시에 클러치를 연결해 스티어링과 타이어를 결합하는 것이다.
일렬 주행처럼 자동차 간에 무선통신을 사용하는 경우는 다른 통신수단을 사용한 이중계를 구축할 필요가 있어 보인다. 무선 통신의 신호도달률은 유선통신보다 낮다.
글 / 채영석 (글로벌오토뉴스국장)
자율주행자동차의 실현을 위해서는 다양한 기술이 필요하다. '충돌하지 않는 자동차'라는 표현을 사용하는 일본의 경우에서 알 수 있듯이 안전이 최 우선이다. 그 안전을 보장하기 위한 기술은 자동차 자체에 카메라와 레이더, 센서 등을 설치해 주변의 다른 자동차나 장해물을 감지하는 것이 우선이다. 이 부분까지는 상당한 발전이 이루어져 있다.
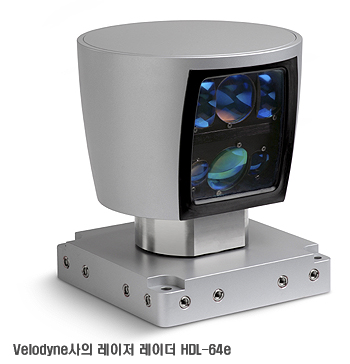
이 센서는 자동차의 아래쪽에 설계해 주변 360도에 수직 시야 26.8도의 3차원 공간에 있는 물체와 거리를 측정한다. 원통 중에 레이저 소자를 세로로 64개 설치해 약 20Hz의 주기로 해 실현한다.
무엇보다 중요한 것은 자차의 위치를 정확하게 추정하는 것이다. 과거 자동차회사들의 연구 대부분이 예를 들면 도로에의 마커 설치와 GPS의 정밀도를 높이는 등 인프라의 변경을 전제로 해 자차 위치를 추정해 왔다. 도로와 GPS 위성의 변경에는 거액의 자금이 필요로하고 공공물이기 때문에 한 기업으로서는 추진하기 어렵다. 결국 연구한 성과는 실현이 용이하지 않다는 결론에 도달했다.

그래도 자동차회사들 사이에서는 인프라가 필요하다는 생각이 강해 어느 기술자는 당초에는 반신반의했었다고 말하기도 했다. 전 세계 자동차회사들이 벨로다인사제 레이저 레이더에 쇄도하고 있는 것은 자신들이 검증해 의혹을 불식하겠다는 의미도 크다.
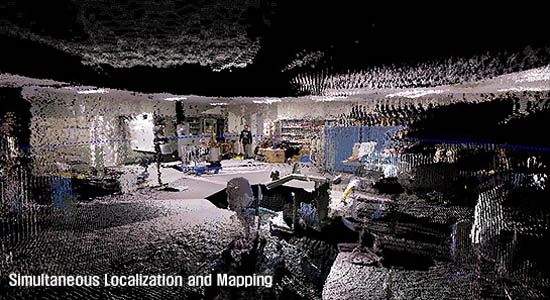
자율 이동 로봇의 개발에서 SLAM의 의의는 사전에 지도정보를 갖지 않고 움직이면서 현재 위치를 추정할 수 있다는 점에 있다. 하지만 자율주행차에서는 어느 정도 정확한 3차원 지도정보가 필요하게 된다. 자동차의 경우는 노면으로부터의 진동이 크고 레이더의 오차가 커질 수가 있기 때문이다. 오차가 큰 정보를 기준으로 SLAM으로 계산해도 자차 위치를 정확하게 추정하는 것은 어렵다. DARPA의 경기에서는 출발 하루 전에 지도정보를 건네주었다. 또 구글사는 자사의 비즈니스에 활용하기 위해 사전 준비된 지도의 개발에 주력하고 있다.

여기에 정보량을 더욱 줄여도 문제가 없는 것으로 알려졌다. 벨로다인사는 2011년 레이저 소자를 32개로 반감해 측정점을 70만점으로 줄인 HDL-32e를 발표했다. 벨로다인사에 따르면 자율주행에 필요한 정보량은 이정도로도 충분하다고 한다. 이미 토요타와 닛산 등이 구입해 검증하고 있다. 계산의 부하는 DARPA 때보다 더욱 적어졌다고. 정보량을 줄인 만큼 CPU가격이 내려가기 때문에 이 부분에 중점을 두고 있다.
최근에는 2~3년 후에는 기존 ECU(전자제어유닛)에 탑재하는 저렴한 마이콘으로 대응할 수 있을 것 같다고 전문가들은 내다 보고 있다.
경로를 결정하려면 우선 주행 가능한 공간을 파악할 필요가 있다. 이 부분에 대한 일부 연구에 따르면 레이더로 측정한 주변 물체의 높이와 형상 등의 정보를 기초로 운전이 자유로울 수 있는 영역, 운전이 가능하도록 한 영역, 장해물의 영역, 미지의 영역으로 나뉜다. 그리고 카메라 등으로 장해물의 특징을 감지해 자동차와 사람등으로 분류한 후에 결과를 지도공간에 색으로 표시한다.
현재의 알고리즘도 어느정도 수준의 자율주행을 달성할 수 있다. 그러나 아직까지는 보이는 장해물에 대응해 차량을 움직이는 초보자 급의 운전이라고 할 수 있다. 최근 그것을 베테랑 운전자처럼 보이지 않는 위험을 고려한 운전에까지 진화시키고자 하는 연구가 활발하게 이루어지고 있다.
일본 동경농공대학대학원 교수는 운전학원 강사의 운전 수법을 실제로 조사하고 그 결과를 집계해 이것을 정형화했다. 이 공식에 따라 주행 공간의 위치에 따른 위험도와 자동차에 요구되는 감속도를 계산한다. 감속도에 따라 자동차의 속도를 결정하고 위험도가 높은 장소를 피하도록 타각을 제어한다.
복잡한 시스템이 필요
자율주행 자동차의 실용화를 위해서는 시스템의 신뢰성을 높이는 것도 중요하다. 각사가 특히 초점을 맞추고 있는 것이 컴퓨터 또는 통신의 신뢰성이다. 복잡한 시스템이 필요하다는 것이다.
지금 개발되고 있는 실험용차의 구성은 일반적으로 제어용과 감시용 컴퓨터를 사용하는 이중계로 통신에는 자동차 탑재 LAN의 CAN(Controller Area Network)을 사용한다. 실용화에 따라 지금보다 더 신뢰성을 높인 시스템이 필요하게 된다는 견해가 강하다.

닛산의 시스템은 세 개의 ECU가 각각을 상호 감시하는 삼중계로 하고 기계적인 백업 시스템을 설치하고 있다. 세 개라면 다수결에 의해 어느 ECU가 고장난 것인지를 알 수 있다. 반대로 ECU가 두 개라면 어느쪽이 고장났는지는 알 수 있지만 그 중 어느쪽이 고장났는지는 결정할 수 없다. 기계적인 백업이란 ECU와 모터 등의 고장시에 클러치를 연결해 스티어링과 타이어를 결합하는 것이다.

일렬 주행처럼 자동차 간에 무선통신을 사용하는 경우는 다른 통신수단을 사용한 이중계를 구축할 필요가 있어 보인다. 무선 통신의 신호도달률은 유선통신보다 낮다.
